6.16
经过长达2周的等待
我认为之前的评估还是过于乐观了
实质性的外部援助大概是很难获得的
而继续拖下去大概会让事情进一步恶化
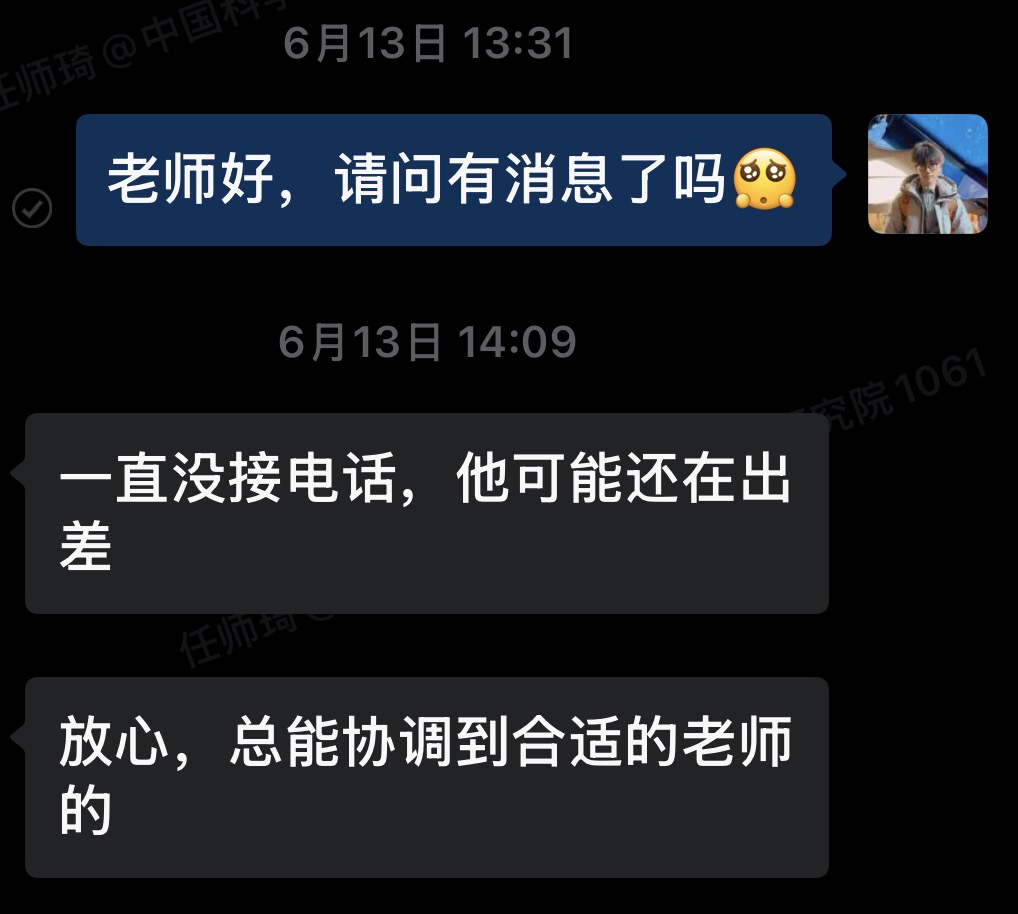
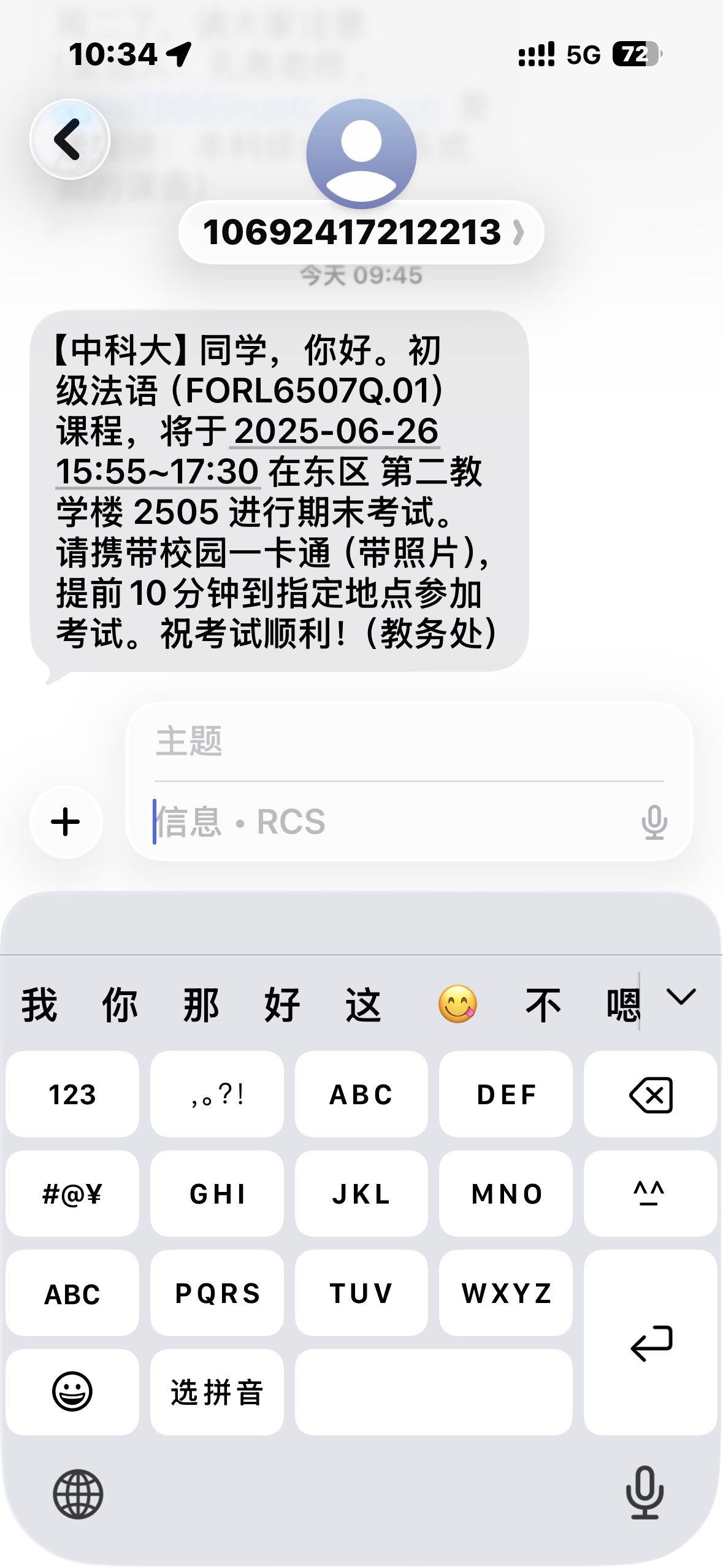
于是我决定赌一把,直接与新的意向导师建立联络
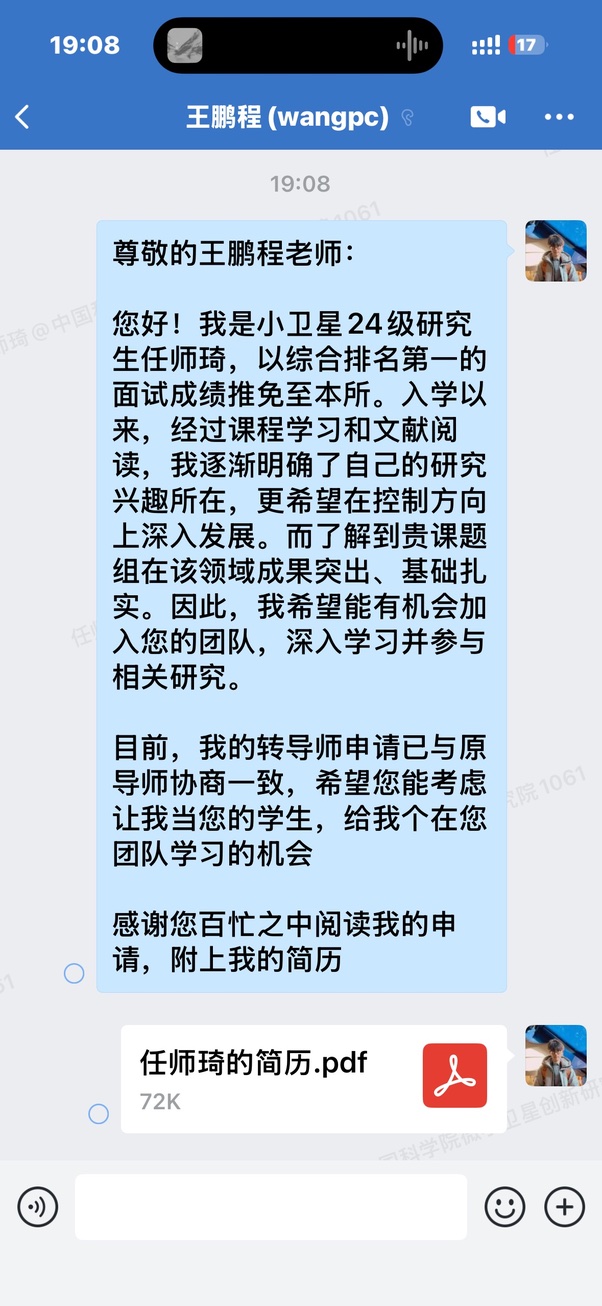
焦虑的等待…
终于得到了回复
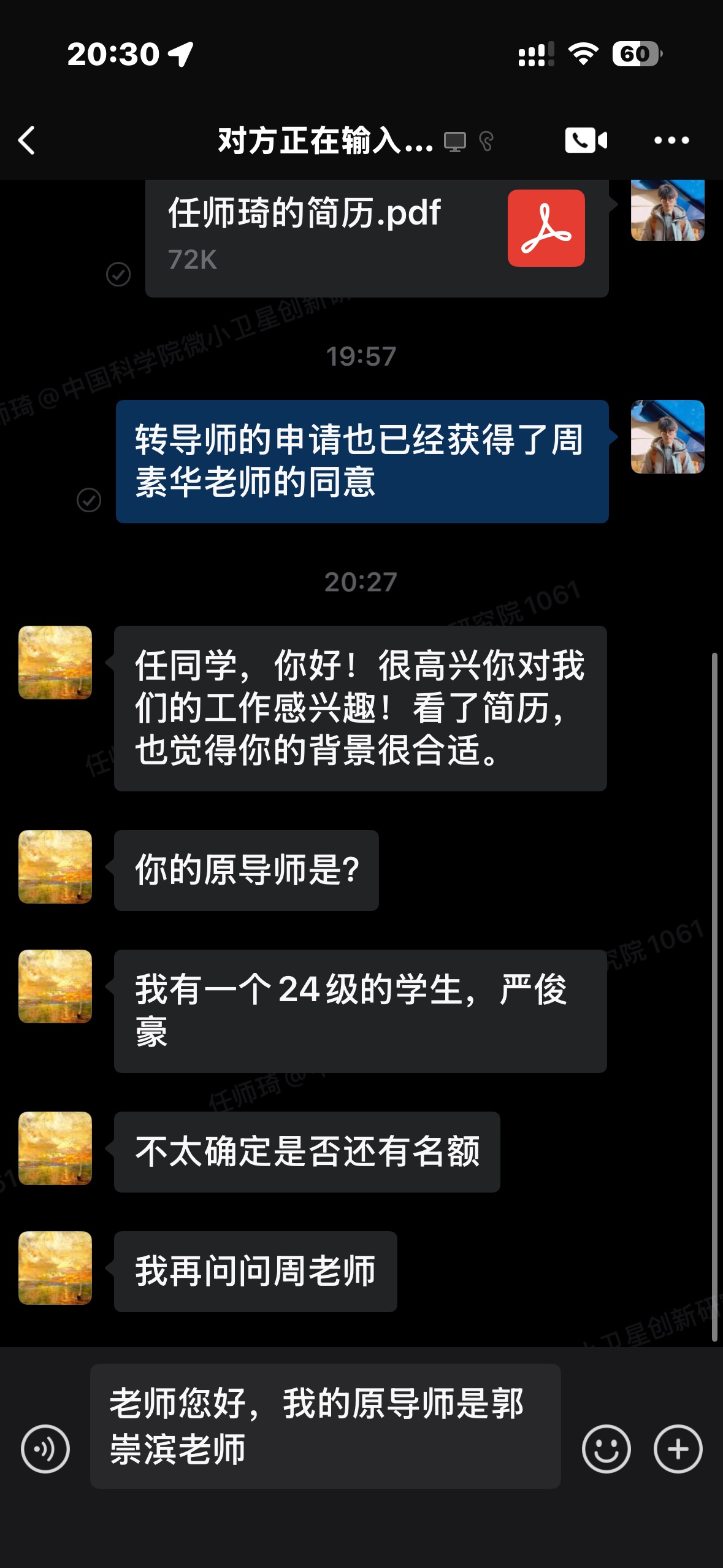
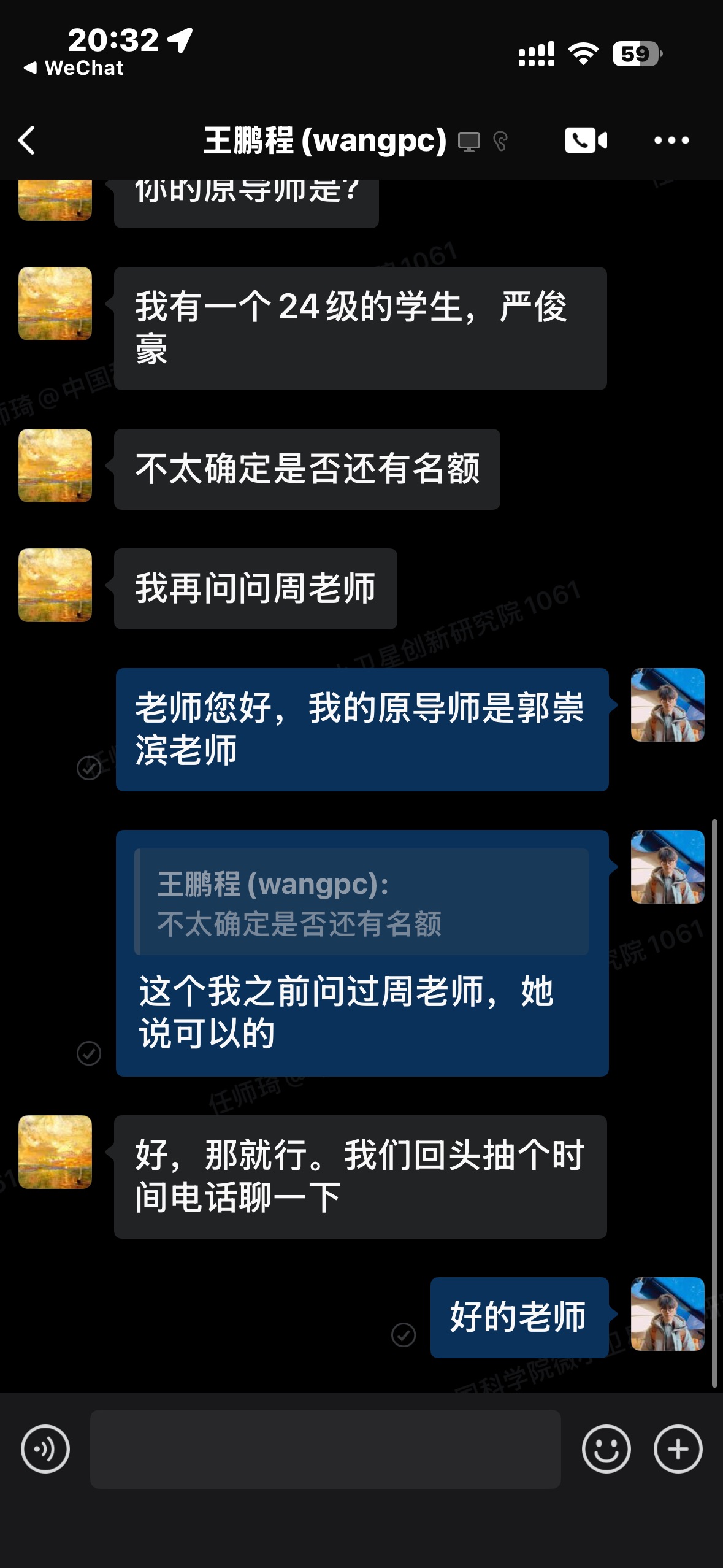
整个决策环节中最令人头痛的一环,果然这是一个绕不过去的坎,我几乎找不到任何有效的解决方案
只能赌他们不要互相联络🥵
6.17
舍友说本学期先研院的食堂换了厨师,并且一直力荐我去尝一尝
按耐不住好奇,真的去了

这TMD谁家好人给番茄炒蛋拌面配个牛肉汤底啊
而且拌面用的还是粗挂面,挂面,它用挂面去做拌面😵
先研院的厨师应当接受审判
六系的毕业典礼
可以领一份神秘小礼物

是小熊!

回去和矿大的小熊摆在一起

我有预感,2年后我还会拿到一个印着中科院logo的小熊!
6.18



吃晚餐的时候不禁感慨
这么便宜的食堂价格回到上海后大概再也体验不到了
而听说张江校区的食堂甚至比临港的还要贵
不过在此之前还是祈祷我能顺利转导师,然后搬到张江吧🥵

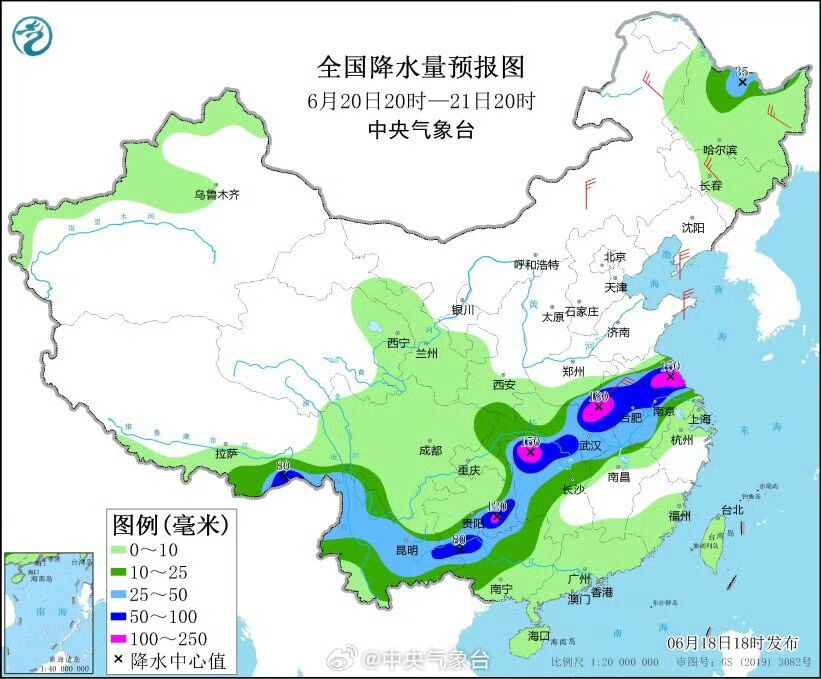
未来一周合肥乃至整个华东地区都将迎来强降雨天气
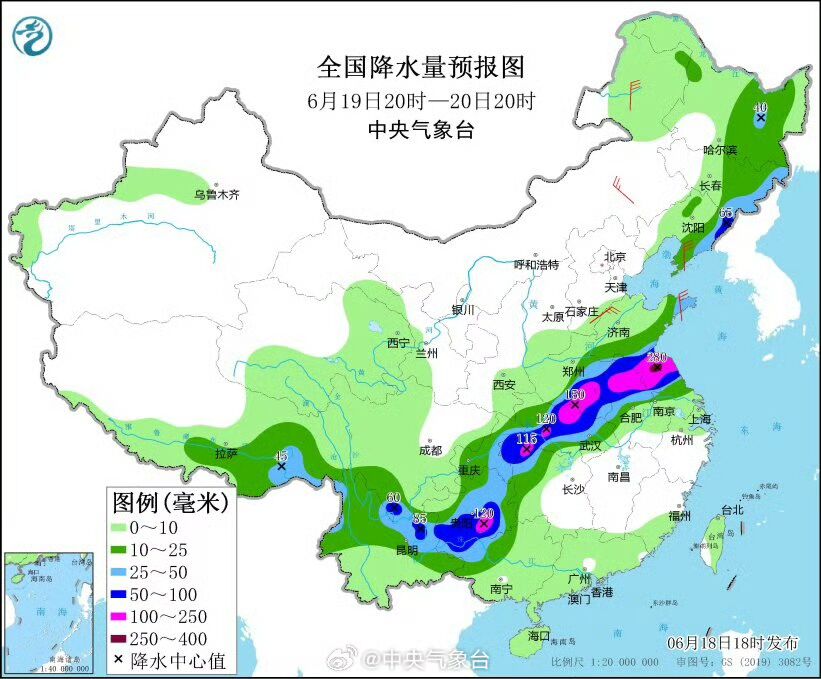
梅雨季要来力🥵
耳机居然也给了beta固件,加入了睡眠检测和录音室级的麦克风算法优化
作为第一批升级IOS 26的beta用户,这是目前唯一的慰藉🥲

除此之外,我认为这个新系统就是一坨大便,我把全家桶都升级了,现在后悔死😭
过去一周我已经通过Apple的系统支持提交了27条issue,上学期写的两个IOS端程序也完全无法编译🤦
不过无论苹果做的如何烂,一众国产安卓还是会在后面的大版本更新中疯狂模仿的🤣
抄过来之后还要翻一翻山海经,起一个新名字☝️,然后发动网络水军大肆碰瓷苹果
前段时间发布的哄蒙桌面版给我看傻了,像素级抄袭macOS,然后去github里的repo下瞎JB提issue
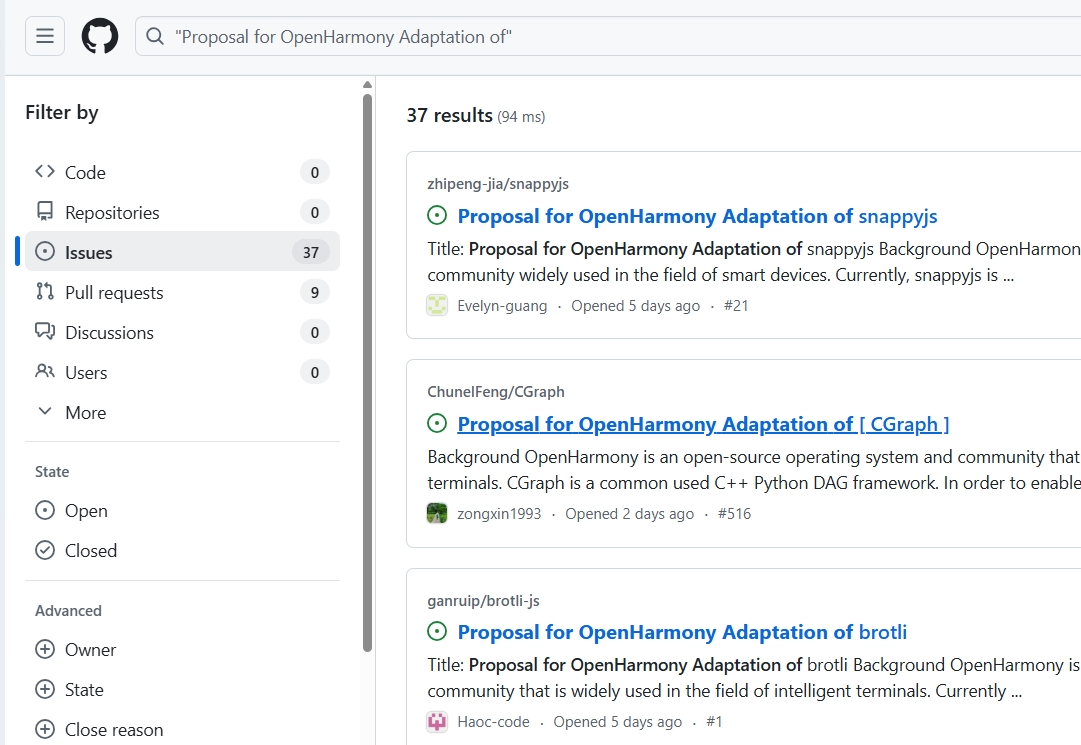
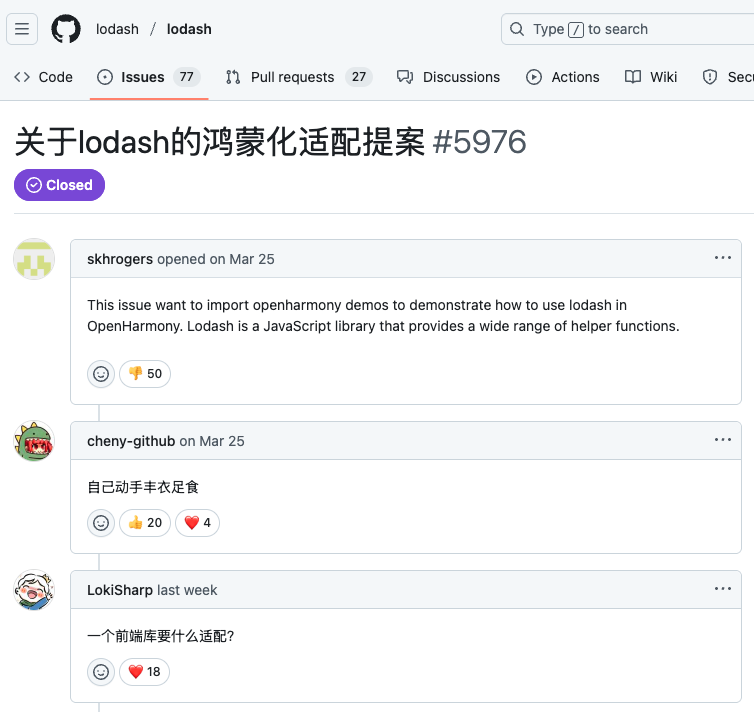
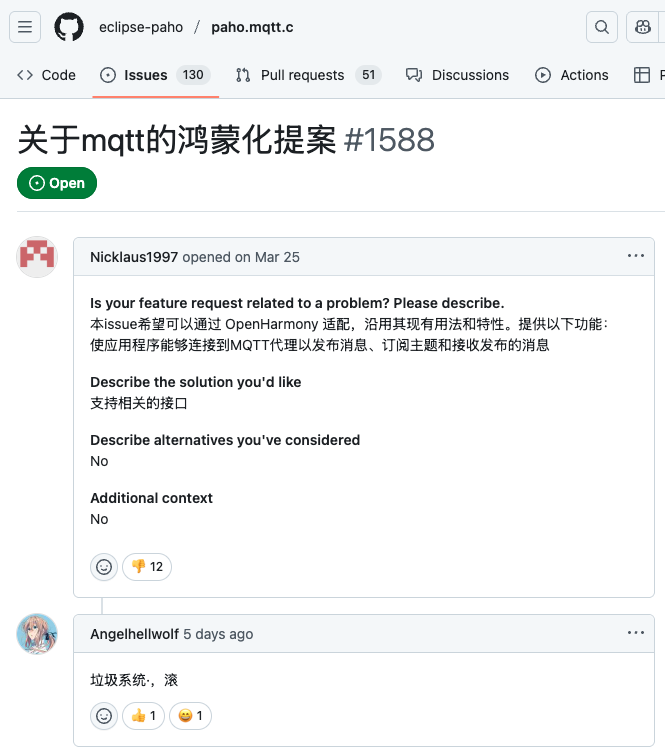
自己搞了一个闭源系统凭什么要求别人去承担维护OHPM构建脚本的负担
都他妈开源了还不自己去Fork嘛,只知道让机器人提交这种低质量的issue
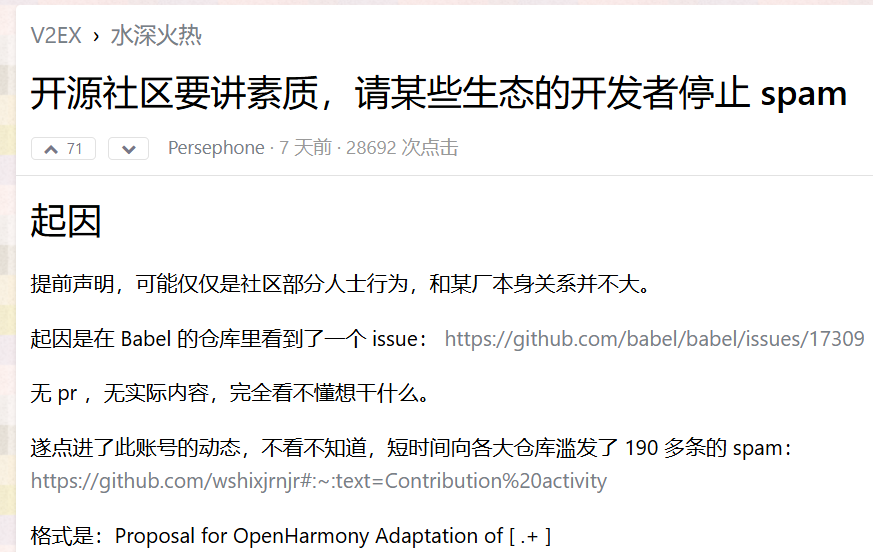
真以为开源社区喜欢这种垃圾OS嘛👉🤣👉

6.19
降雨如约而至
窗外的世界也开始变得模糊

提问:
1.Gaussian Blur与Mean Blur/Box Blur的区别?
2.此情此景,与哪种Blur更为相似?
如过有学过数字图像处理,想必你已经知道答案了
我们认为Gaussian Blur是对周围像素值基于高斯分布的加权平均,在数学上,这相当于图像与一个高斯核进行卷积运算,而Mean Blur/Box Blur则是周围像素值的算术平均
每一个雨滴就像一个独立的透镜,透过的光线会发生复杂的折射和散射,将背景空间扭曲、放大或缩小,这种光学现象并非均匀地模糊所有细节,在扩散时光强由中心向外自然衰减,与Gaussian Blur的加权平均特性极为相似,光点会化为柔和的光斑,类似Bokeh,这远非Mean Blur/Box Blur所能模拟
法语是我本学期的最后一门考试
再熬一熬,考试月就过去了🥵
路过走廊的公共阳台
雨夜中却显得格外静谧

不过每次路过这里都会触发一些不好的回忆
刚失恋的时候总是坐在这里,整晚整晚的和朋友打电话
失眠了就过来坐着
好一点了再回宿舍
然后又失眠
就这样周而复始
对着城市的夜色,发呆

在先研院和高新校区之间有一片偌大的工地,听说是在扩建中的科大的商学院
刚来科大的时候工地还在如火如荼的施工
这几天已经拆掉了很多设备,大概也已经进入了尾声
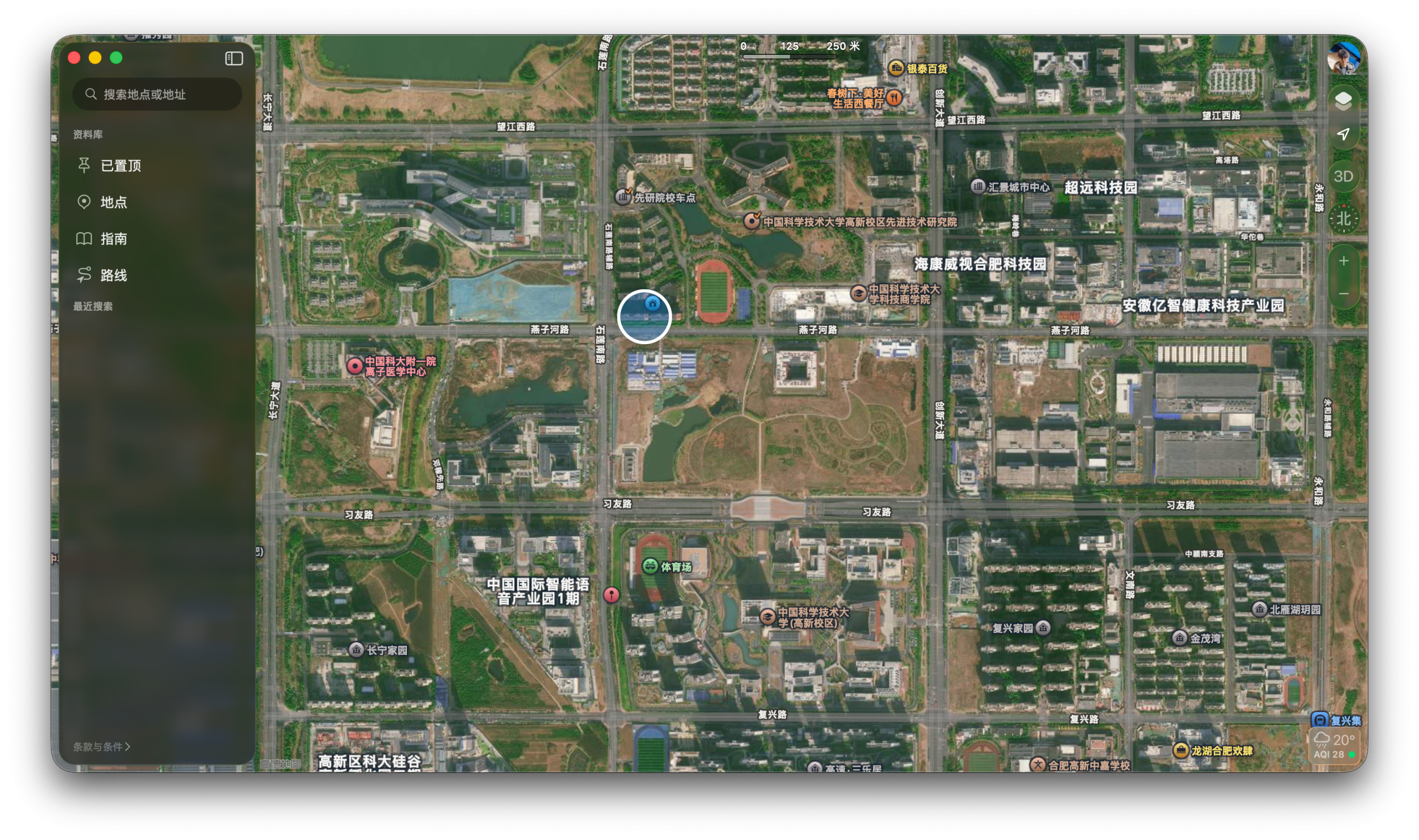
下一届的学弟们大概不用每天绕着石莲南路骑一大圈去高新了
但或许他们也会坐在那个阳台,坐在那把熟悉的椅子上,因为各种各样的原因
继续对着城市的夜色发呆
但无论如何,它们看到的应该不是破败的工地了
6.20
吃晚饭时突然接到新导师的电话
聊了下培养模式,在科大修的课程,未来的研究规划,以及假期的旅行计划
更详细的事宜回所之后商议
但我认为没什么大的问题了
后面老师加了我的微信
然后…我被直接拉进群了!
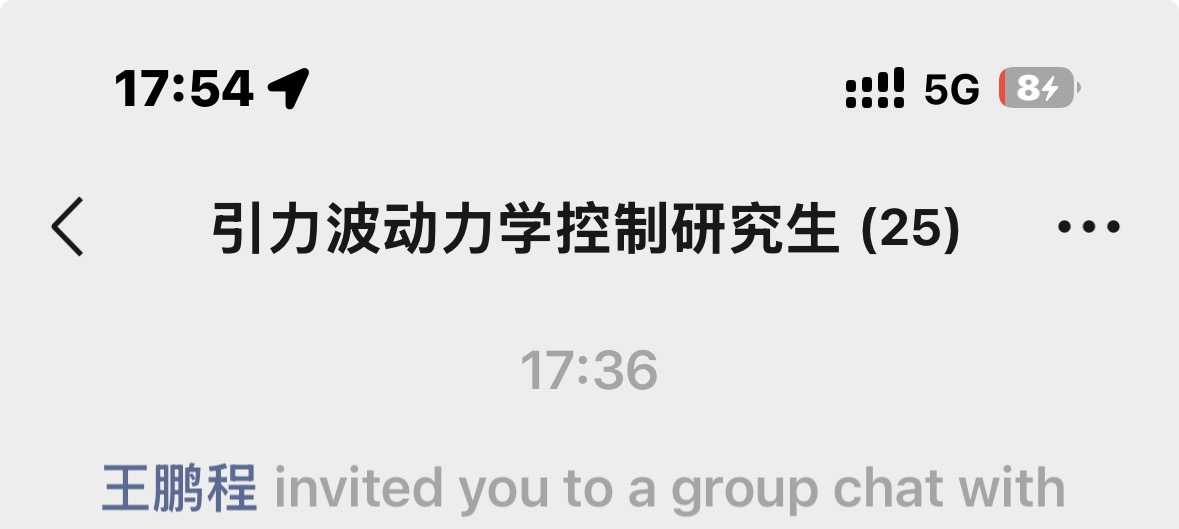
好结局!

转导师的事情,大概告一段落了
虽说如此,现在还不能开香槟
签署上转导师申请表才是最终的胜利🥵
不过那只能等回所再说了
剩下的这几天,终于可以放松的享受一下生活了
回想我去参加夏令营时的点点滴滴,到我第一次提前进组,再到我们之间爆发的种种的矛盾,这一切像梦一样不真实
放弃去德国读研是我过去23年做过的最糟糕的决定
过去这一个半月发生的种种荒诞又离谱的事情加剧了我对国内科研环境的悲观立场,我当然知道欧洲和北美也有类似的情况,但至少在一个相对来说更完善的约束与监管体制下,权利可以得到应有的制约,换句话说,至少他们下限高一点
兜兜转转,最后还是All in Control Theory,如果一切顺利的话,我会在9月开始新的研究方向,第二代天基引力波探测卫星的动力学控制
相应的,我也调整了自己的中长期规划,在原有的设想中,我会利用三年的时间将自己培养为一个机器人学领域的全栈工程师,但很显然,我无法在这个平台得到有效的资源和指导,而新的规划则是着手于机器人学最复杂的分支————Dynamics,我认为机器人领域将在未来15年内保持高速发展,掌握并精通这个领域中最复杂的分支可以保证自己的拥有长足的核心竞争力。
6.21
之前拍过的胶卷还有3卷没有冲洗
今天心情好,也终于有时间来享受一下了😋
这次冲洗不准备用自制的维生素C显影液了,尝试一下新买的Rodinal

按照1:50配置的药液呈现出很淡雅的紫靛色
采用满罐静置的显影方式

效果还不错

数字化翻拍

因为FtoE的转接环坏掉了,目前还不能用放大机的微距镜头
所以这次翻拍用的是Tamron的28-200变焦镜头

可以看到即使在对焦距离最近的28mm端,也只能利用到CMOS的16%左右的像素面积
好在翻拍使用的是索尼的A7R系列高像素机身,拥有4570的有效像素
在极限对焦距离下,自动对焦往往会拉风箱,所以这个时候切换到手动对焦模式,使用峰值对焦辅助进行合焦判断,我们说峰值对焦是一种加强版的sobel算子,而后者则是我上学期GPU的大作业题目,能咋如此低算力下跑一个效果这么好的边缘检测,还是蛮厉害的

最终的部分成片如下


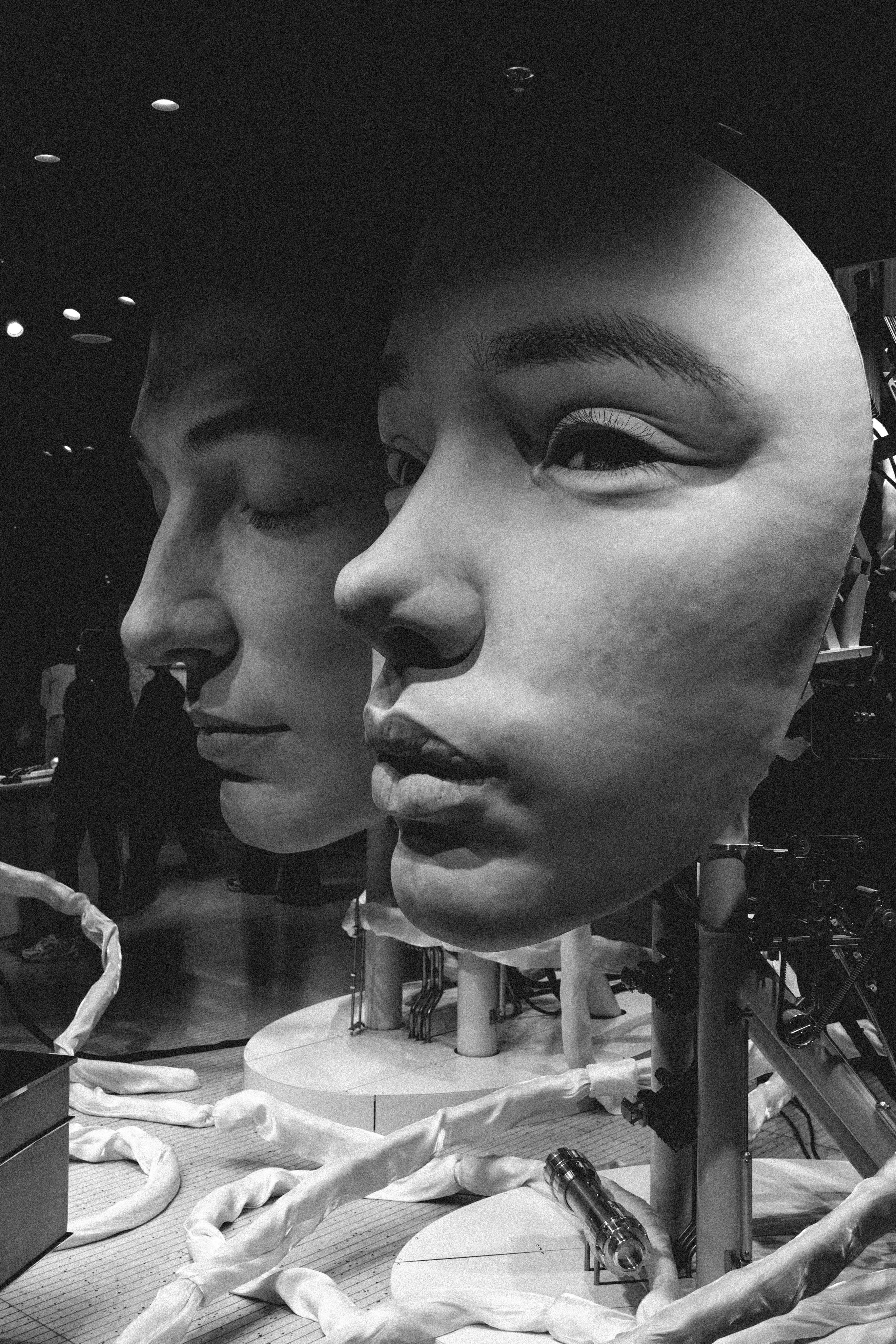
等新的转接环到了再重新翻拍一遍
发表回复