2026.1.27更
今天终于难得有心情写博客
看了眼草稿箱中的碎片,最近一篇还算完整的博客停留在了Week 24

不知不觉又是2个月没有更新博客了)

虽然不是一篇完整的文章,但我依然决定修改其为可见状态
因为我大概很难再像研一那样有着充足的时间和精力去完整的记录
2026.2.25 更
虽然我在1.27决定公开草稿箱中的这篇文章
但作为一个完美主义者,以及一些赛博洁癖,我仍不忍心看着这篇写了一半的文章出现在我的博客中,以至于鬼使神差的又拖了一个月才public

晚上心情不好,想着来写写文章让自己平静下来
顺便补全赛博烂尾楼
原始内容👇,更新于2025.11.27
开题
终于完成了开题答辩,这段时间的忙碌告一段落,于是得以更新一下博客
从转入新的课题组到选题的确立,中间这3个月的时间,重新决定了贯穿我硕士生涯的研究方向,不禁感慨
研究课题是我综合考虑实验室资源以及未来5年可能产生的技术突破做出的判断,虽然实验室的主要研究方向还是围绕着传统的控制理论,但导师非常支持我自拟的这个课题,我们拥有相同的判断:强化学习会是未来的主流,它将为航空航天领域带来突破性变革,我们应当拥抱这种新的范式
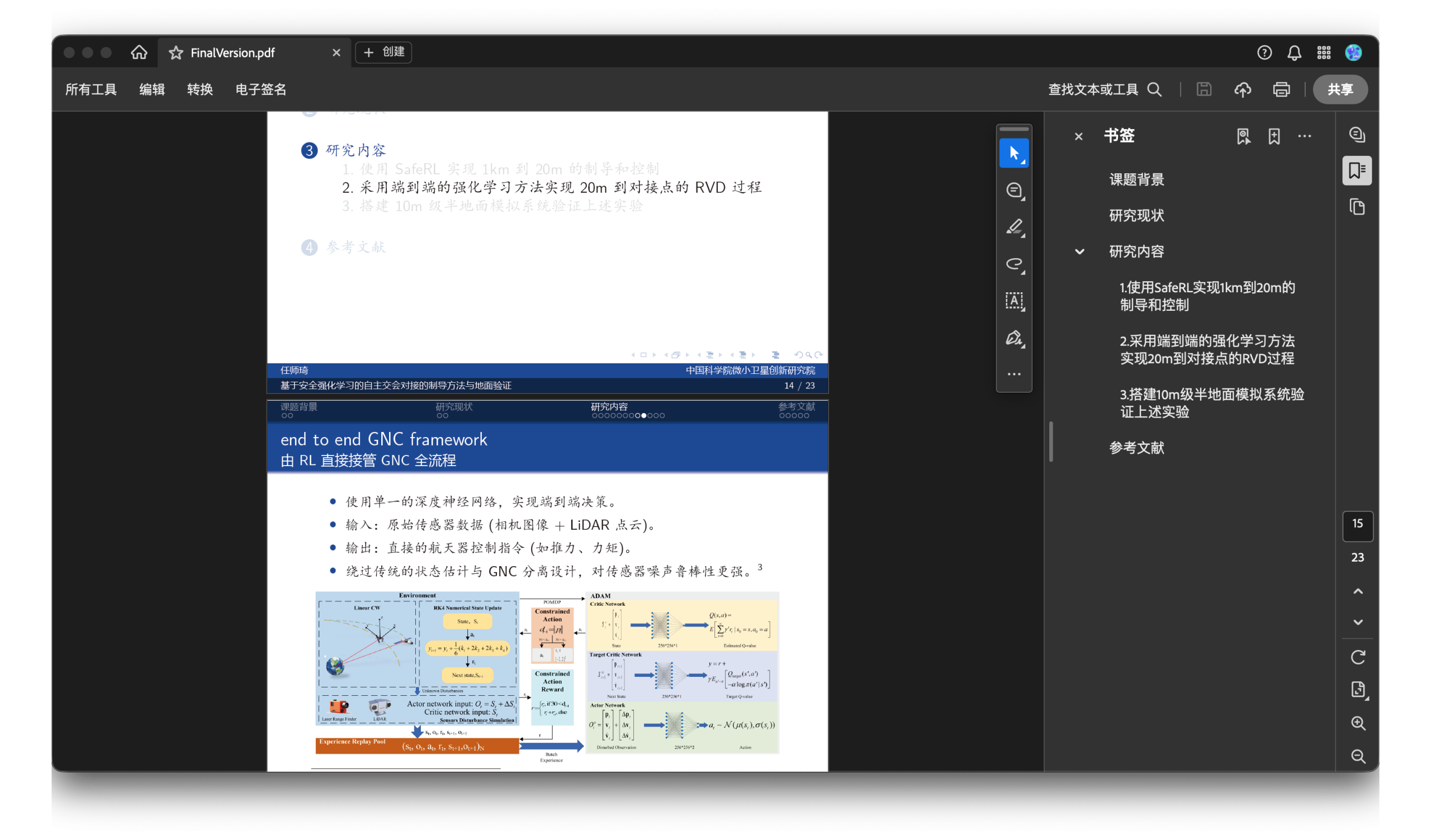
核心内容是把强化学习的方法应用于航天器的交会对接,分为两部分
1.使用SafeRL的方法实现远距离的GNC过程,将Chaser的对接距离从1km拉近至20m
2.由E2E的RL实现末端的RVD
换言之,在1km后,RL控制器将会接管GNC全流程

我们的轨道系统将会被用于进行硬件在环的模拟
如果你也对这个课题感兴趣的话,可以从这里下载我答辩的slides👇:
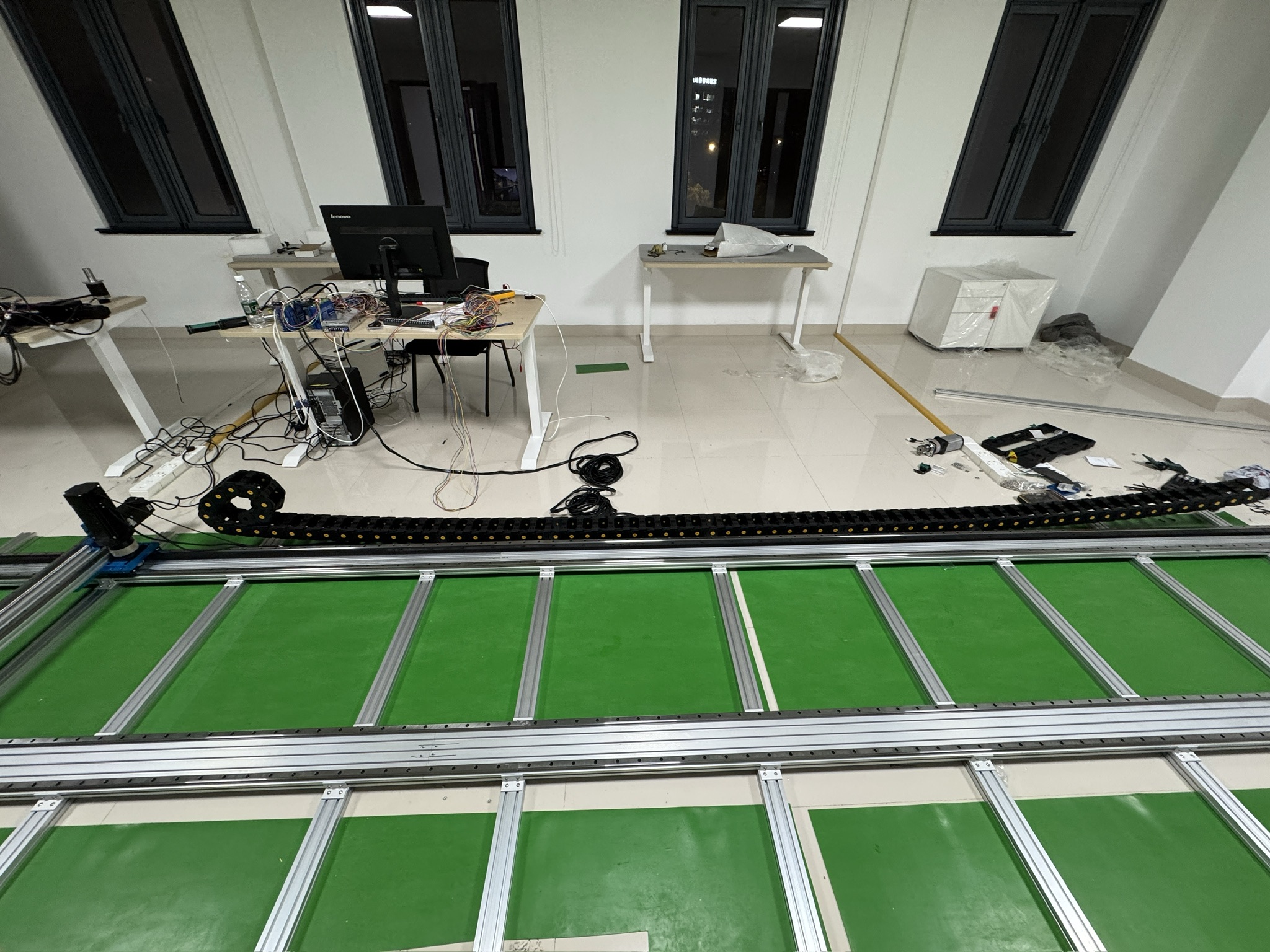
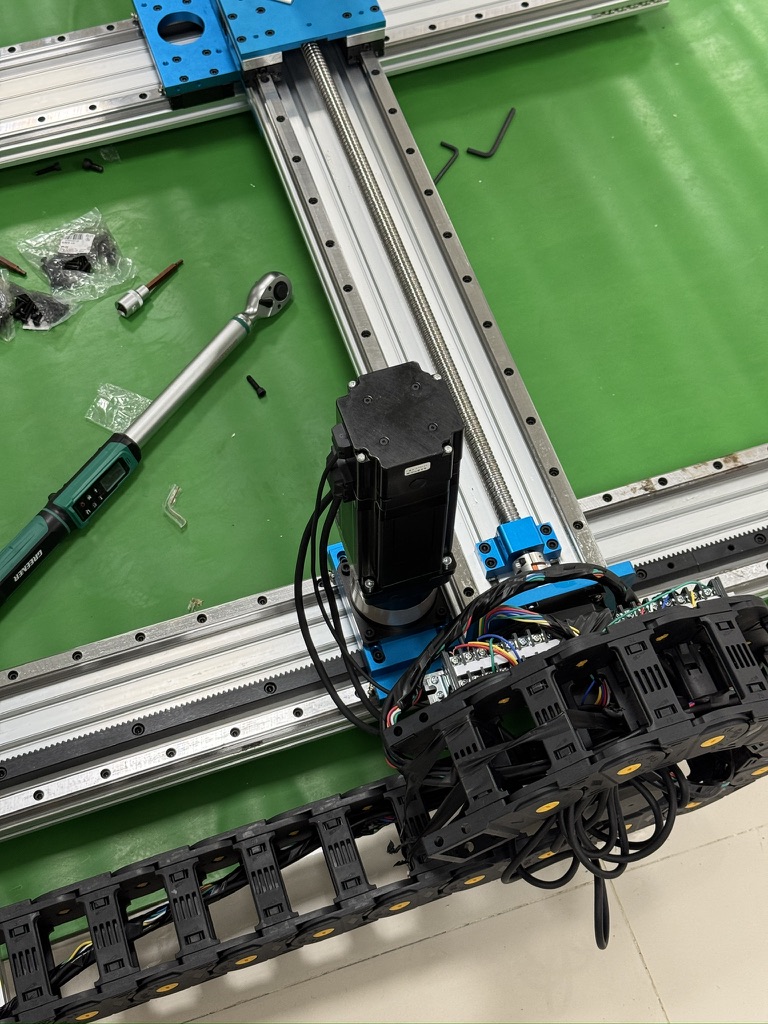
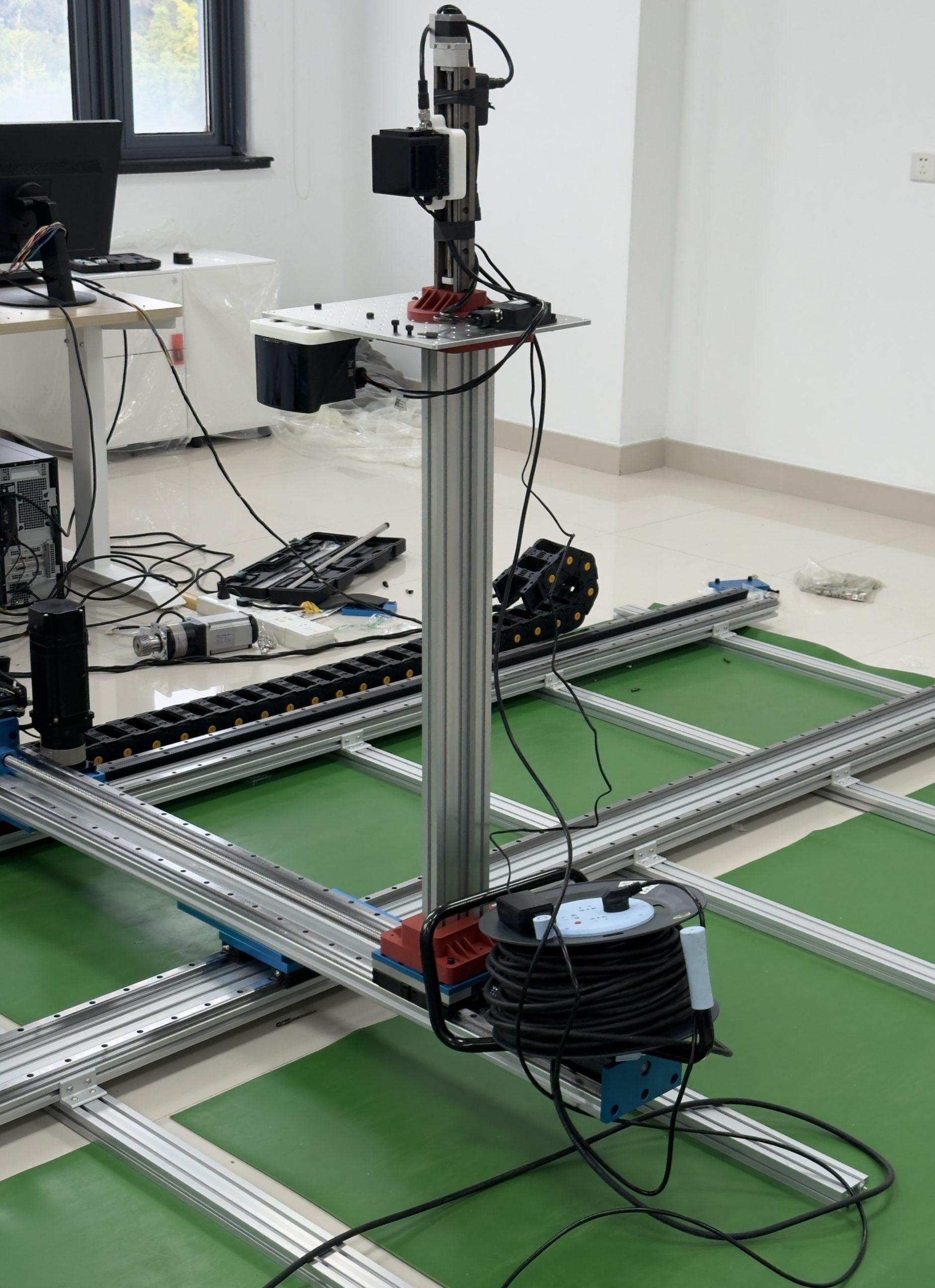
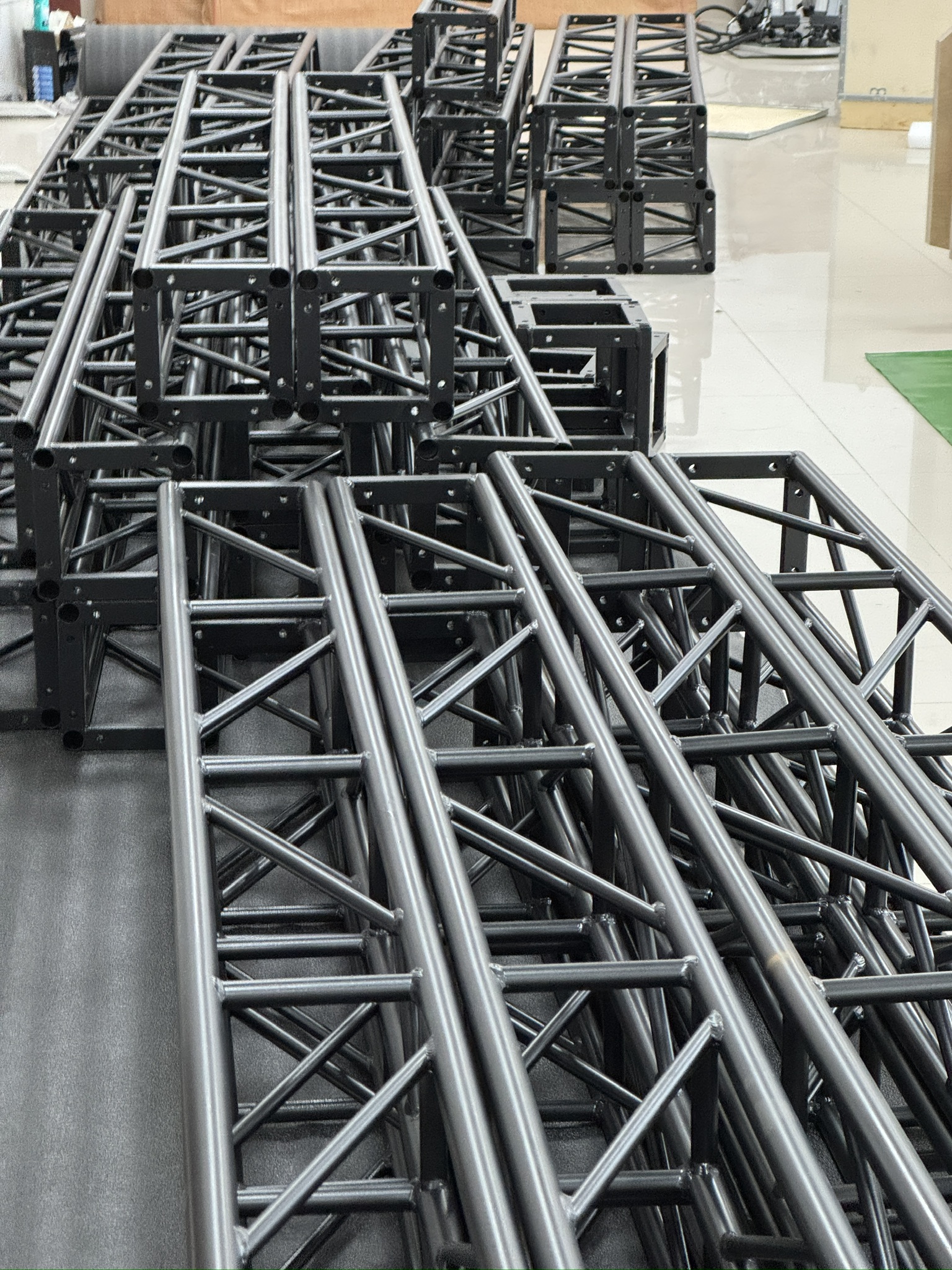
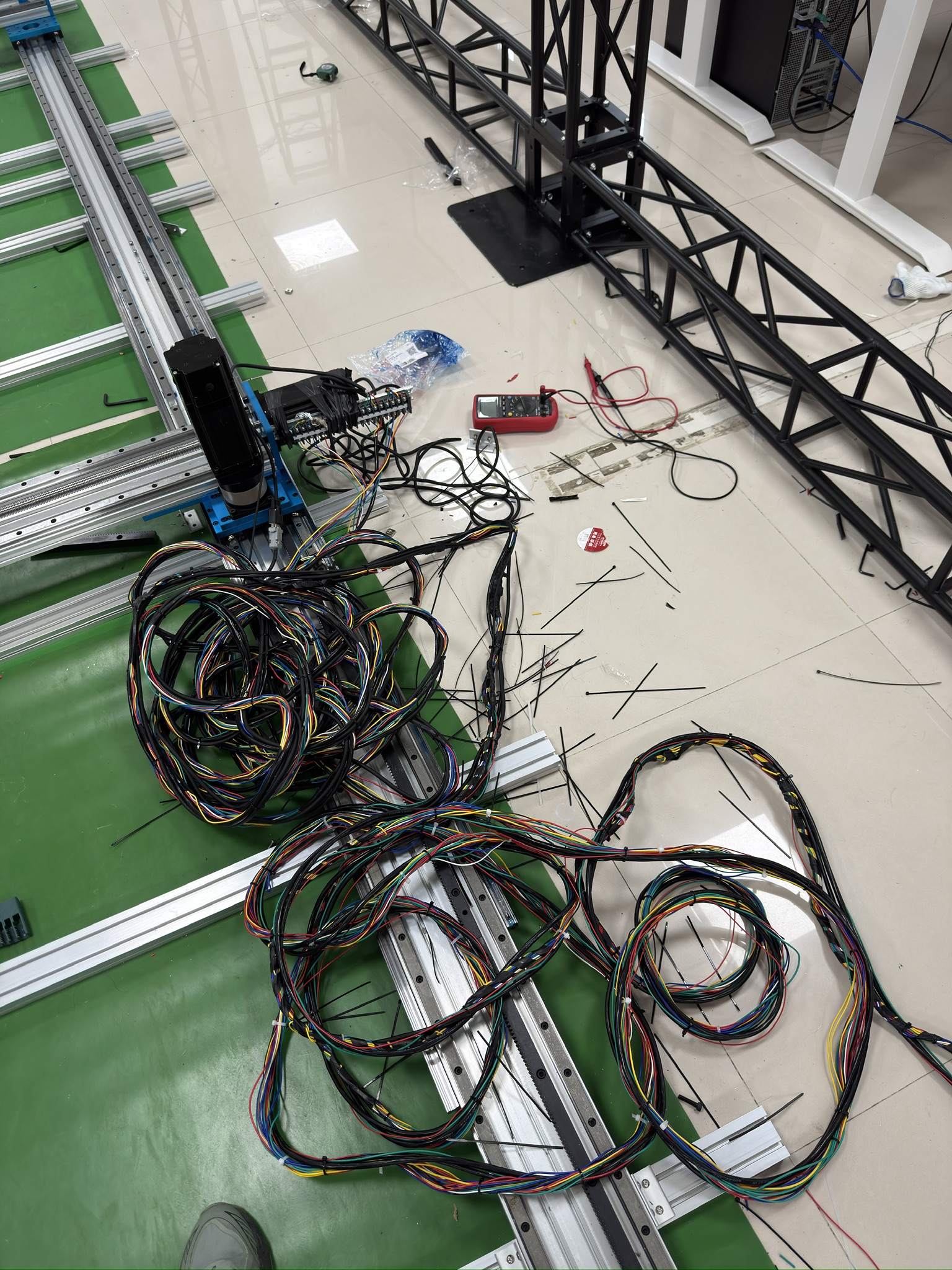
轨道系统
为了更好的进行线束管理,我们买了拖链。
第一次看到这东西是在金工实习的时候,机床上一般都会有,可以让线束沿着特定的方向弯折,可以更好的保护线束

不过这玩意实在重的离谱,安装也是相当的麻烦
简单的组装和调试

这何尝不是一种单摆阻尼器
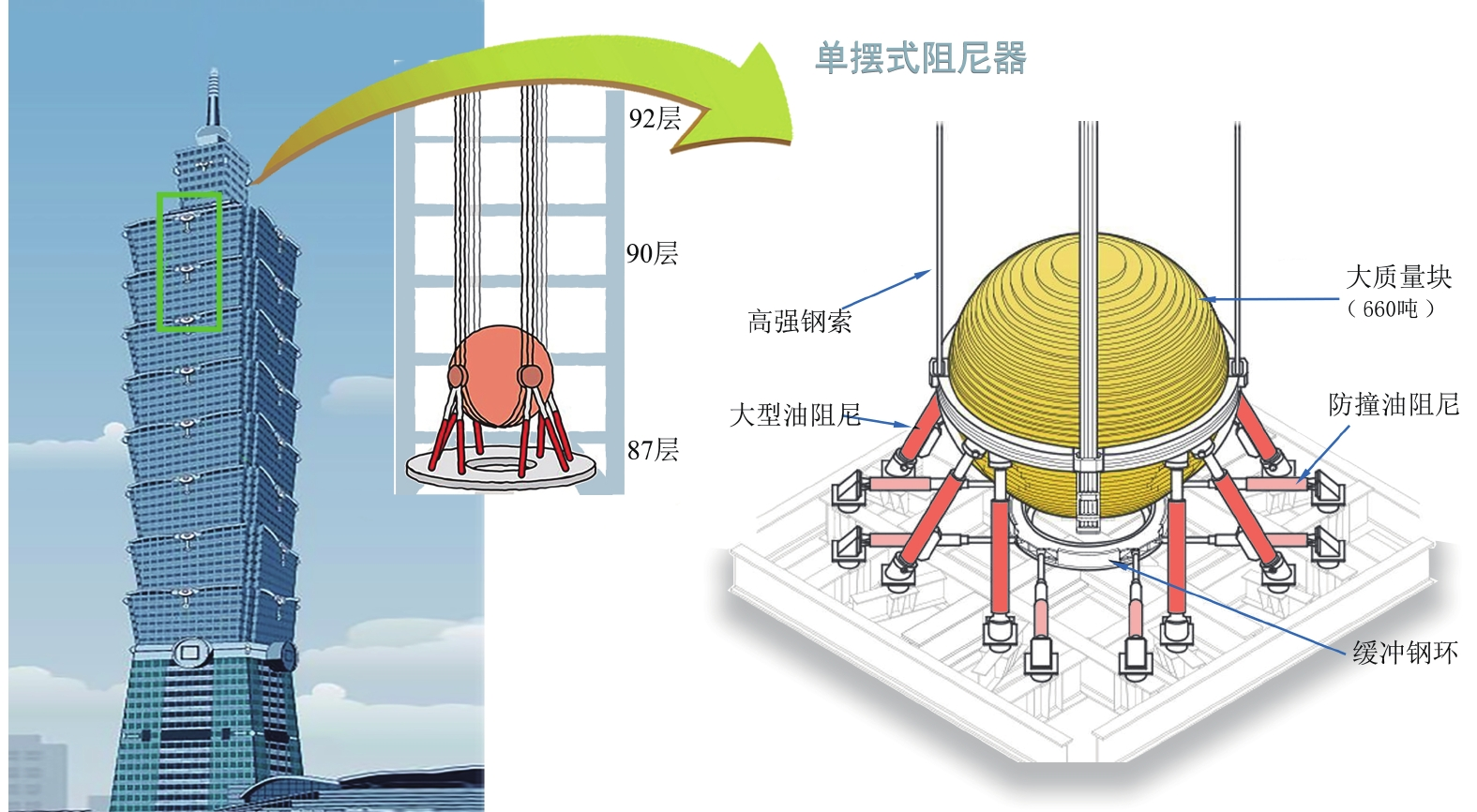
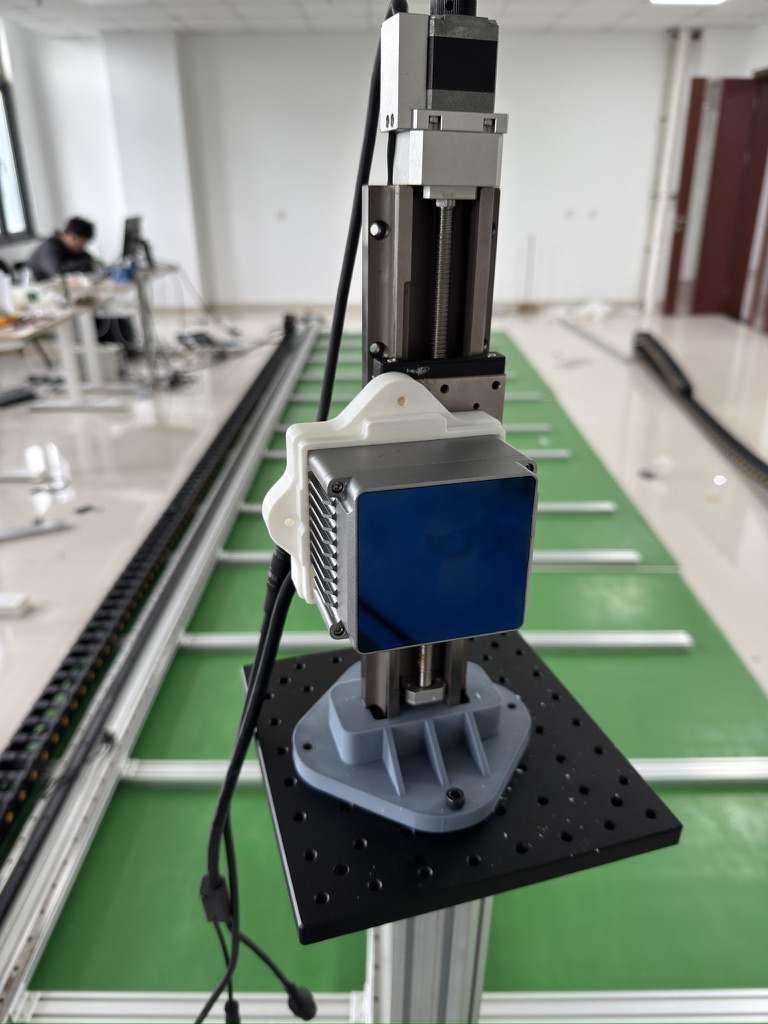
瞎说的,阻尼器要先测量震动频率和模态,这个水瓶是为了配平
因为着急测试激光雷达,所以在还没调试好的情况下赶鸭子上架装上了
嗯,所有支架都是我自己设计打印组装调试的🤔
轨道系统运行的非常流畅,在标准工况的速度下丝毫不抖,简直完美(这其实大大超出了我们的预期

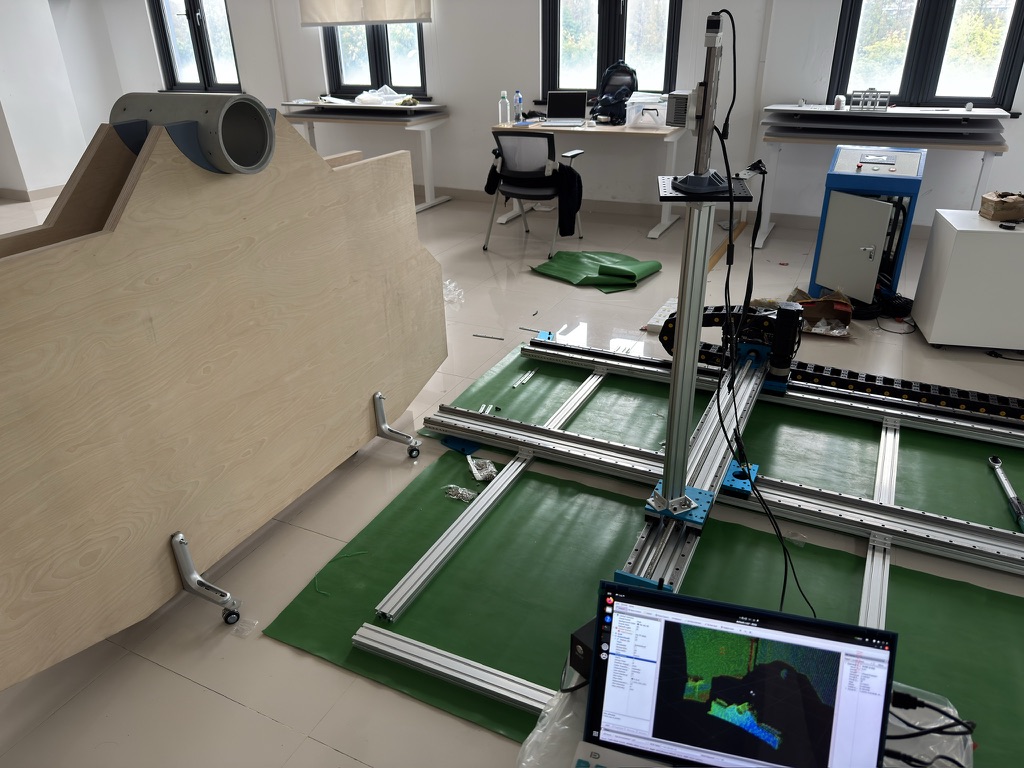
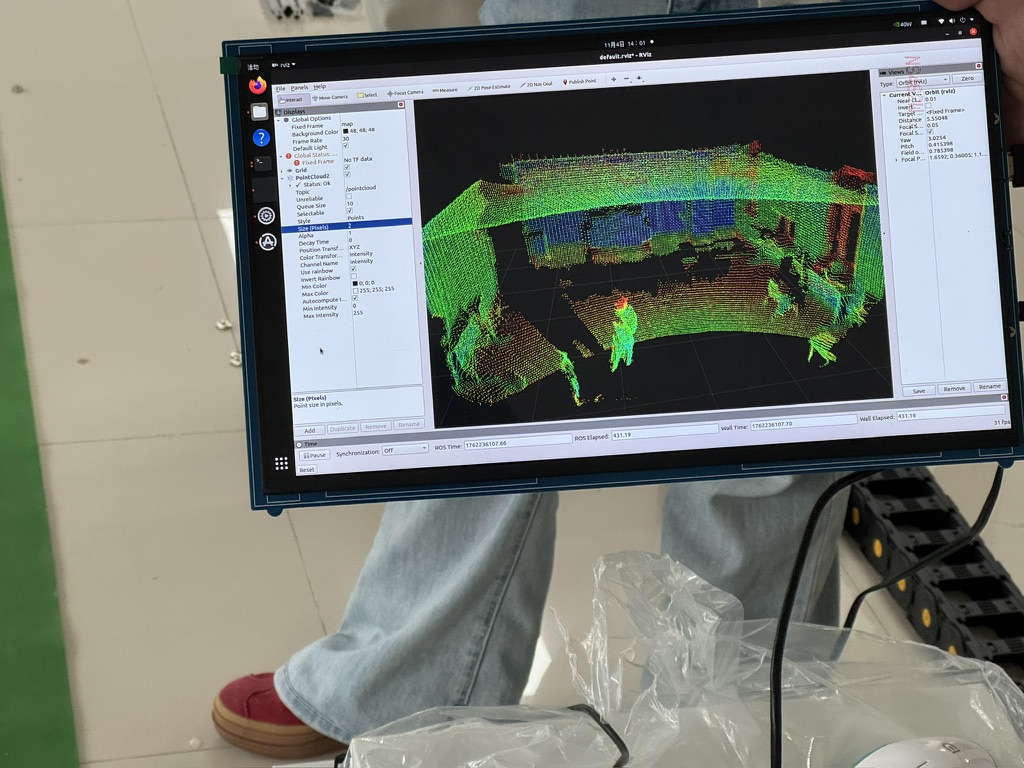
点云图,后面的E2E过程中激光雷达的RAW数据会作为input
因为购买不到用于连接的标准件,我设计了全新的转接机构
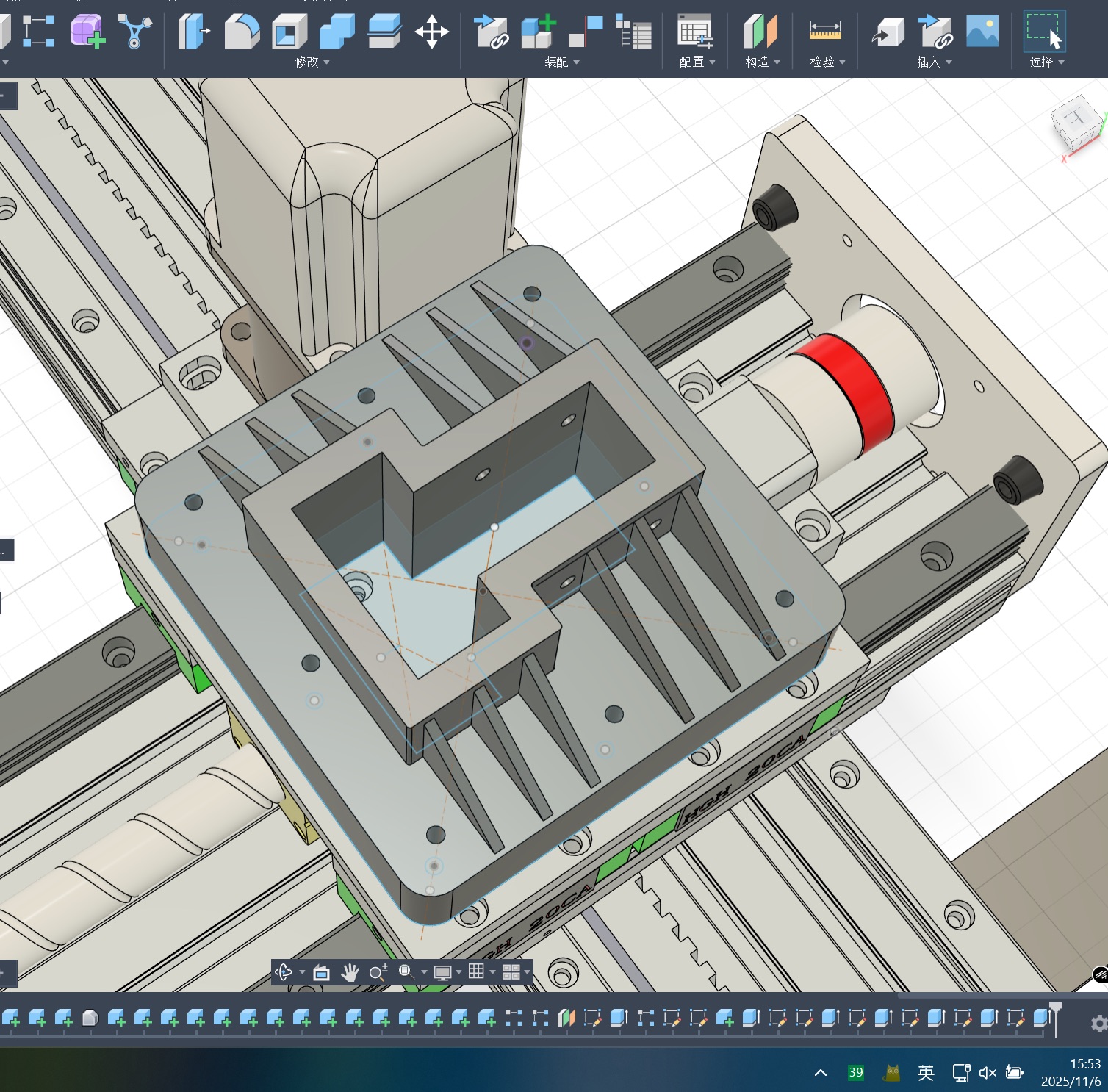
公元2025年,拓竹终于出了原厂的PETG_CF耗材

强度和刚度相较其他副厂的好很多
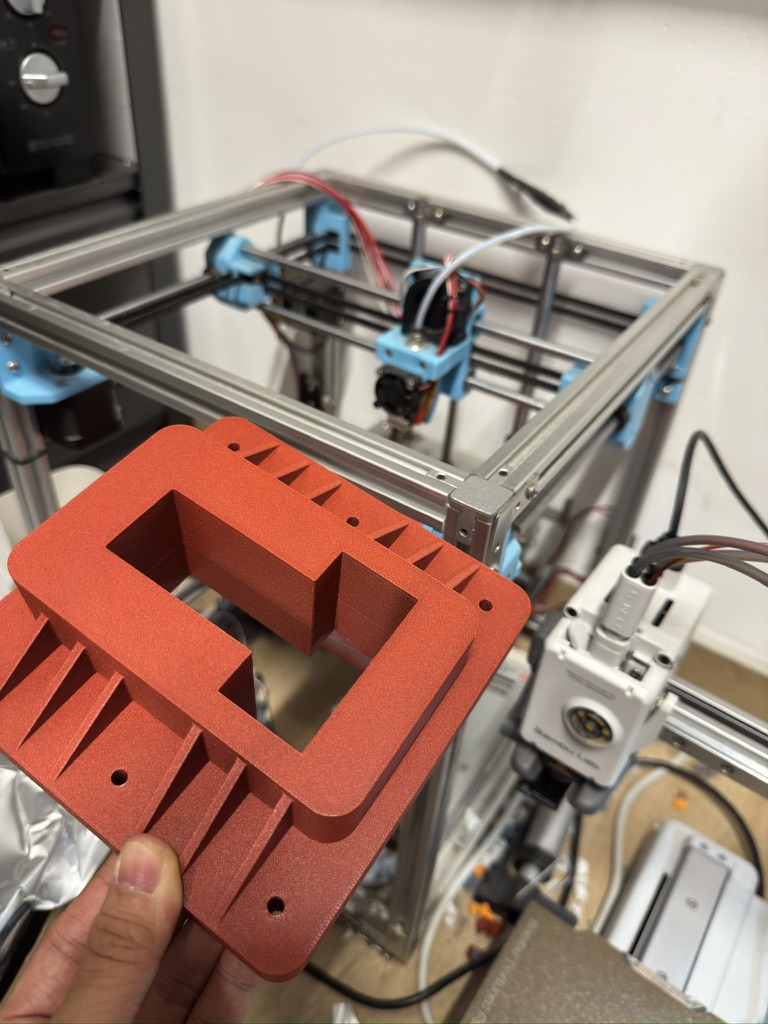
简直就是艺术品
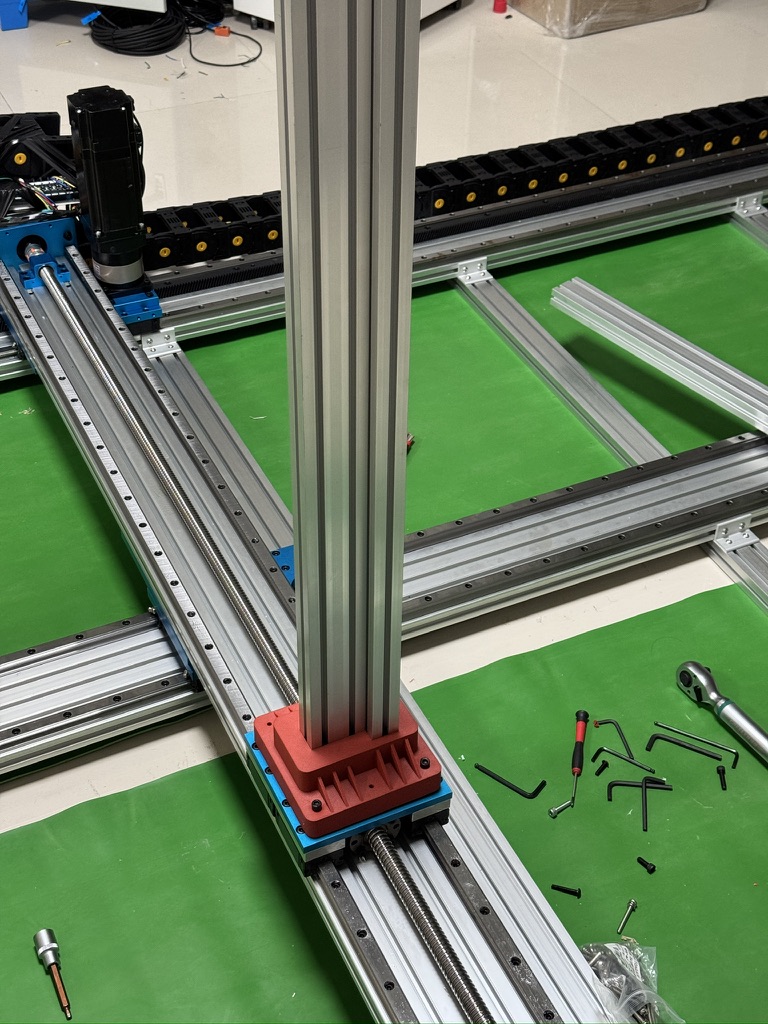
完美契合
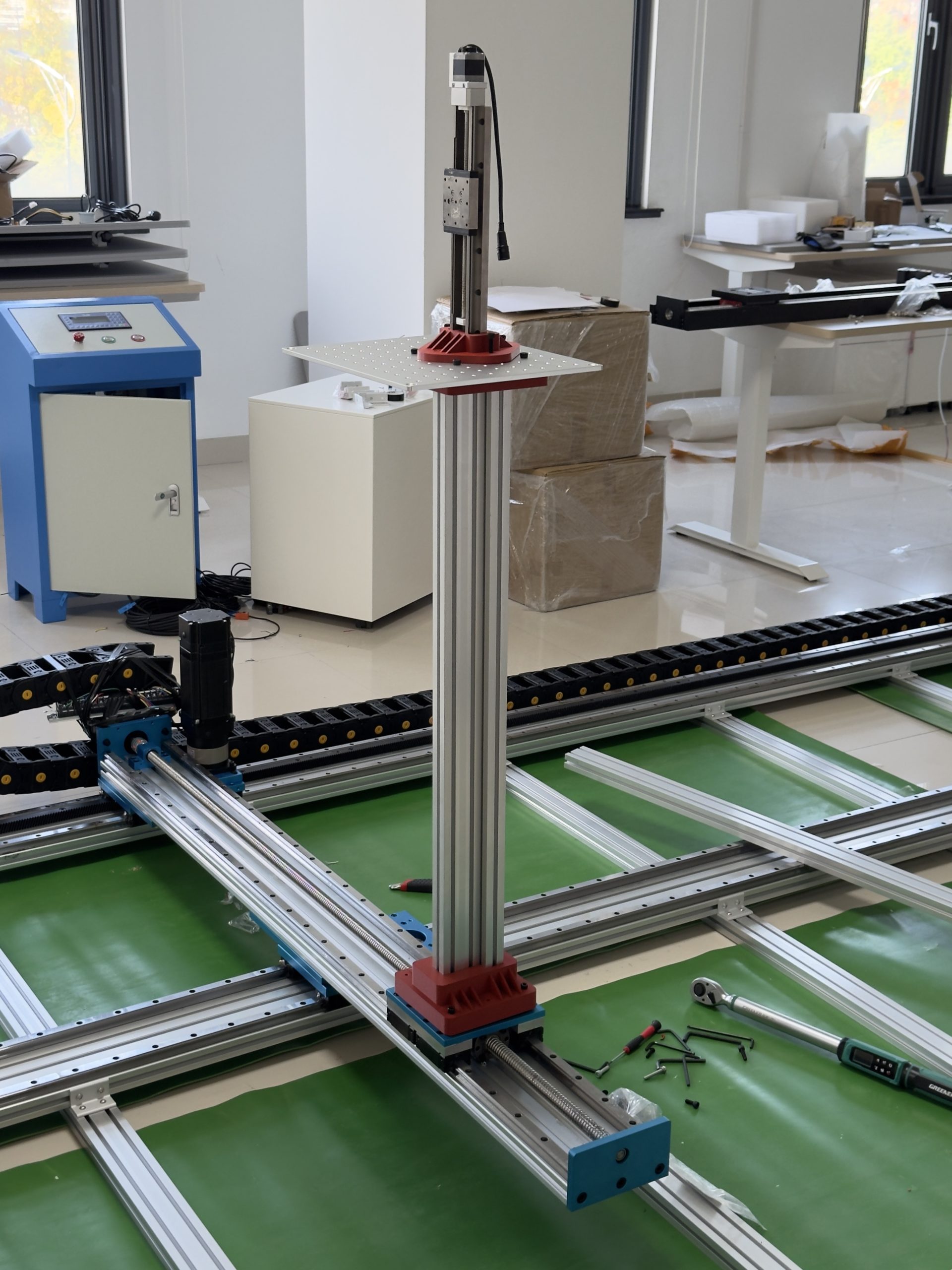
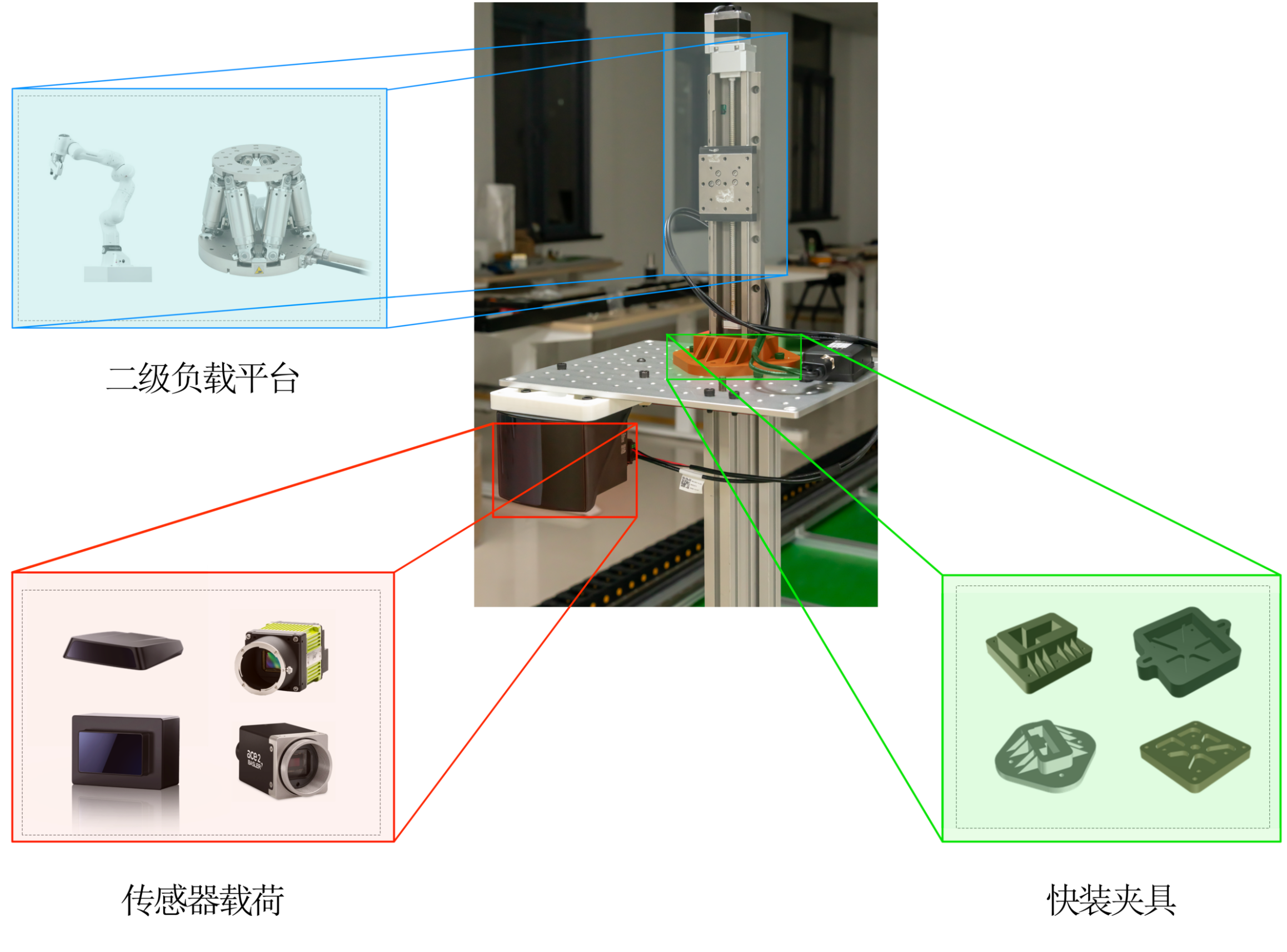
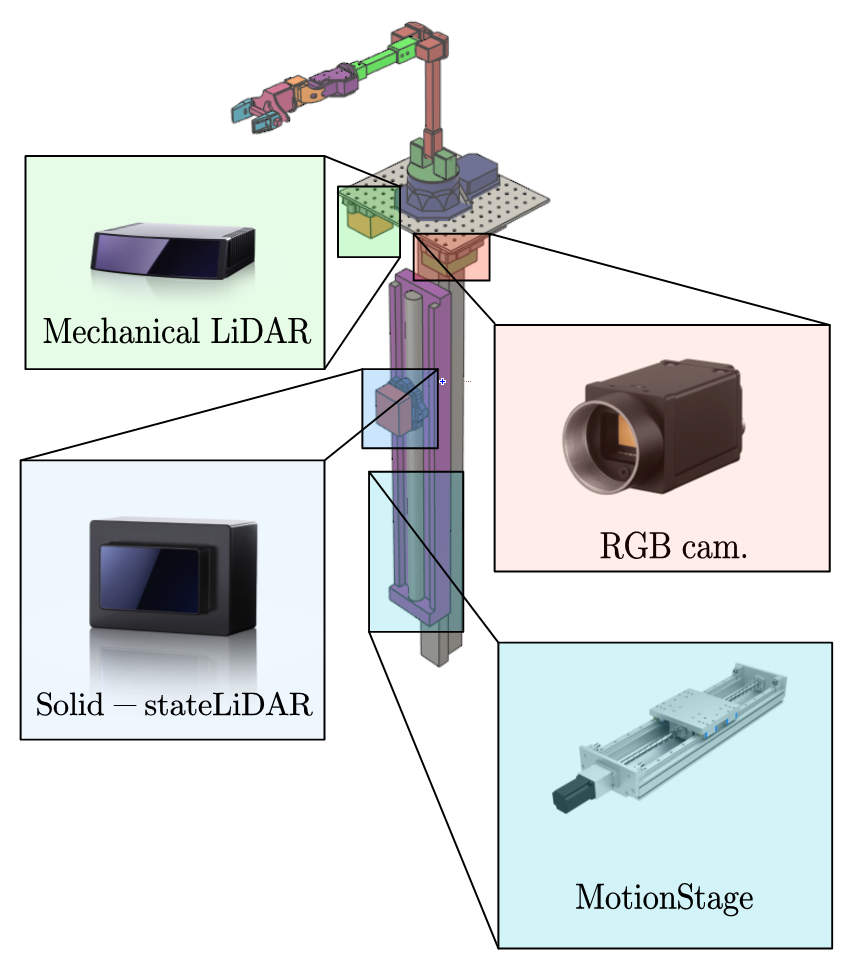
买了好多敏感器,光是激光雷达就有3个,他们拥有不同的视场角和分辨率,最终都会被部署在这个轨道系统上
大概是这样,后面我们还会部署六自由度平台以及机械臂

越来越多的其他课题组希望与我们合作,共同使用这套轨道系统
为了满足这些新的需求,我们将对轨道系统进行升级
一套桁架将会被搭建以部署更多的传感器
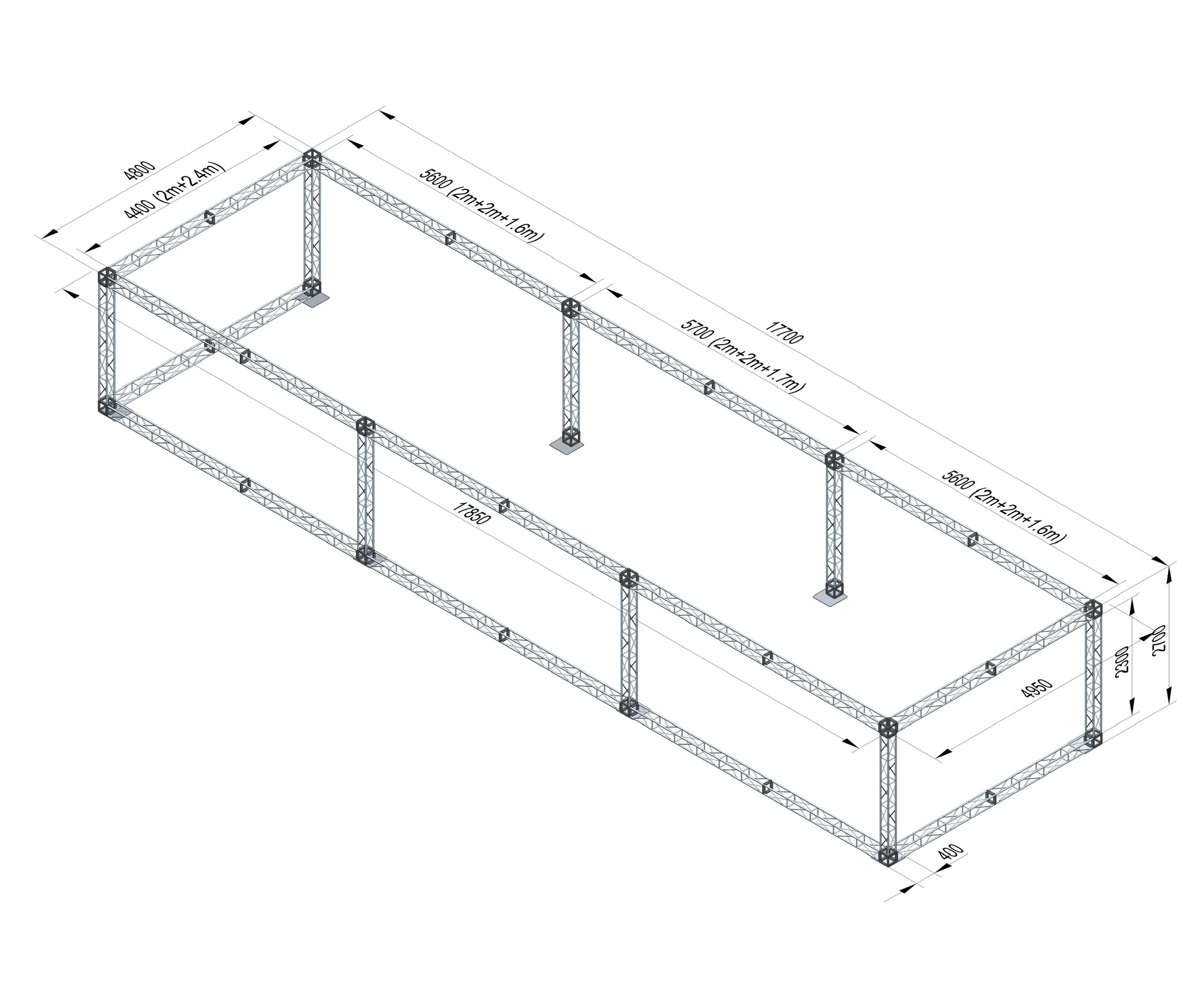
生产商提供安装服务,不到6个小时就装完了

恐怖的中国速度
意味着我摸鱼的时间被压缩了)

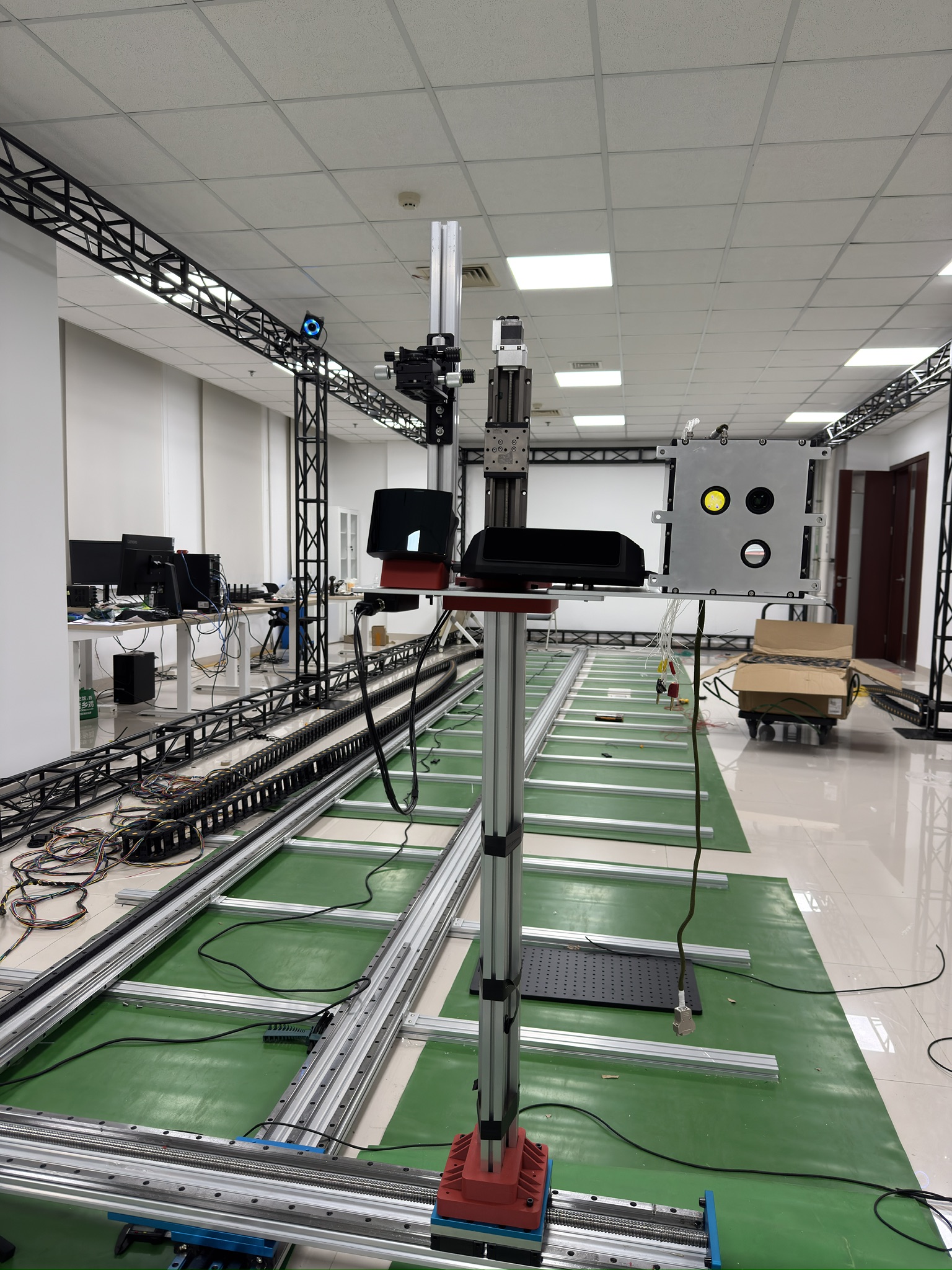
动捕相机

这玩意还挺贵的,暂时只有4个

在我们的硬件在环实验中,Chaser的绝对位置将由这些动捕相机提供
此外,我们还将对轨道进行延长处理,从原有的10m增加到15m

驿站里奥特曼的快递络绎不绝


好久不用有线耳机了,带你回忆一下如何理线😉
顺带干爆了一个电源

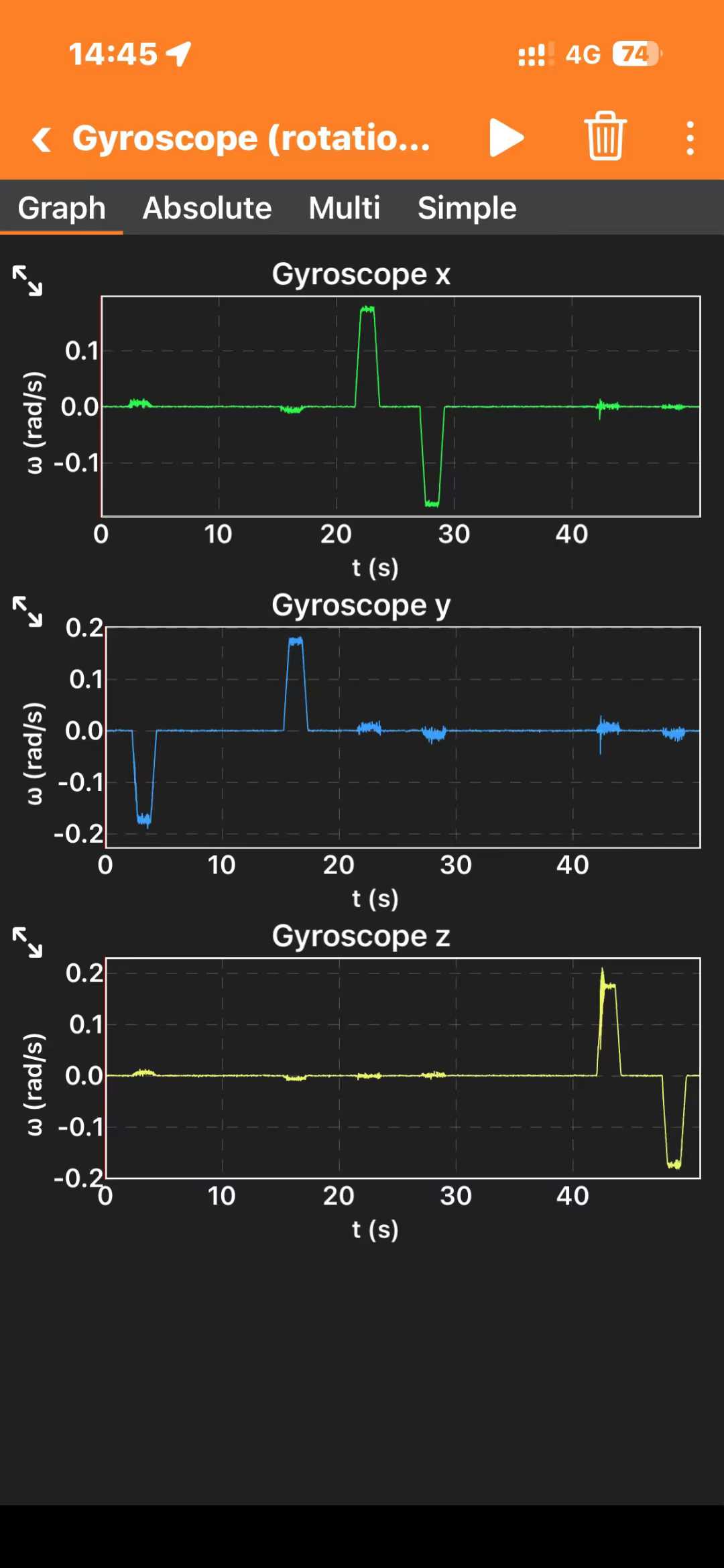
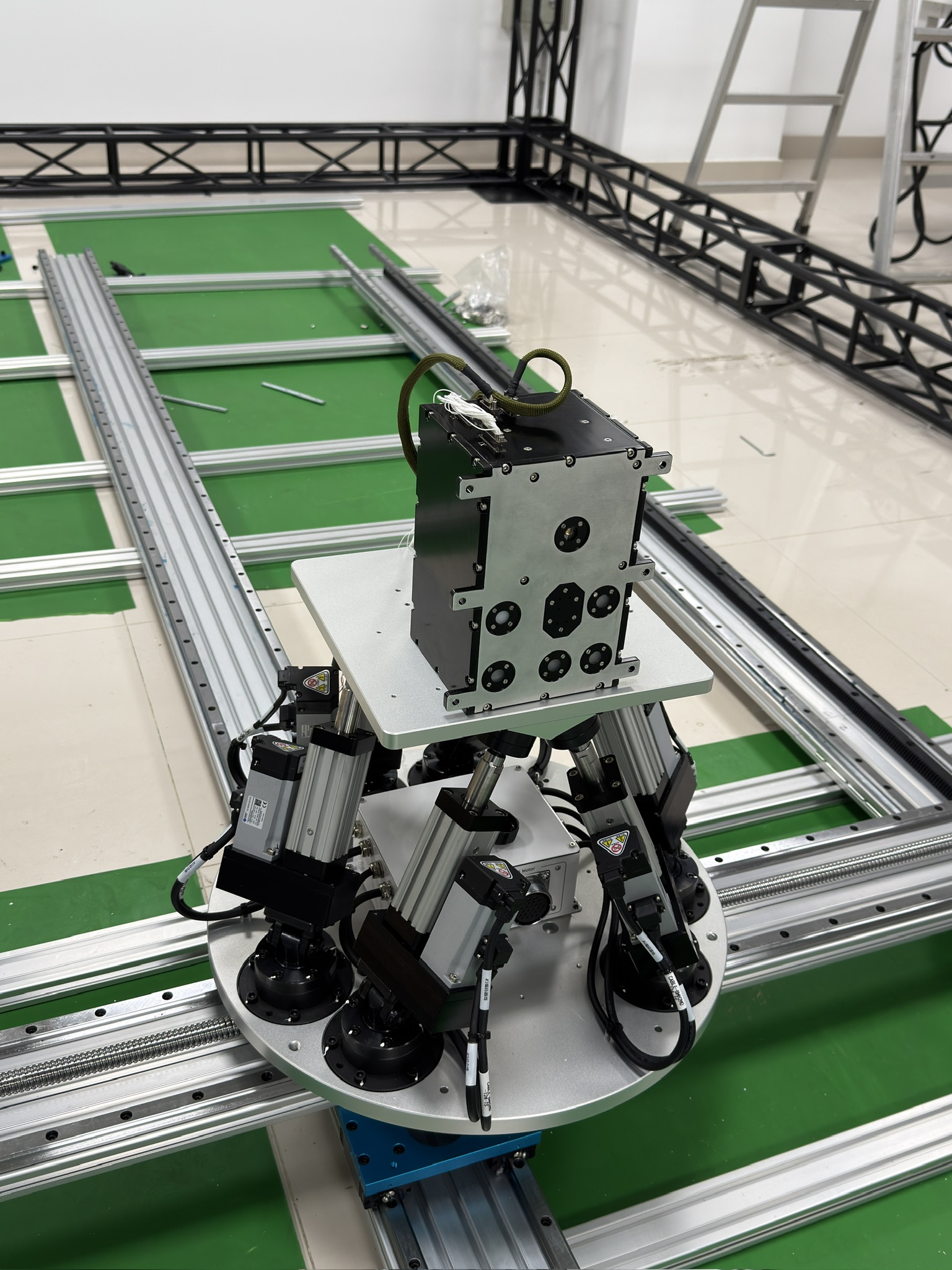
六自由度转台,这个小玩意花了8w多😮

没想到iPhone还能用来测角速度吧

简单粗暴但高效!
还可以直接输出RAW date后期自己滤波
为了模拟工况下的复杂照明情况,我们需要将实验室变成一个巨大的暗房:完全隔绝外界光源



丑了点,但能用就行)
不知道为什么买窗帘送蕾丝
真是从正规渠道买的🗿)
学弟把它系在了对接机构上
还挺性感👍)
晃杰,凭什么ban我
我要去你办公室拉电闸😠
中间冒出来个所谓领导说要近期视察实验室,于是我们被要求连夜打扫房间,把一切看起来会让房间显得很乱的设备都搬走

你知道的,真正有产出的实验室永远都是乱乱的,所以做出这个决定的人就是那种典型的媚上欺下,而且蠢的像头猪的家伙,按照经验推测,它们多半是靠人情世故爬上的领导层
这种充满官僚风气的面子工程让我感觉很是不爽,也更加坚定了不在国内读博的决心
我们的航天系统有大问题!

发表回复